

Vision-based autonomous unmanned plane landing guidance device and method
A technology of autonomous landing and guidance device, which is applied in the directions of measurement device, navigation, surveying and mapping, and navigation, etc. It can solve the problems of long-distance detection of weak and small infrared targets, and the inability to obtain the attitude, speed and acceleration of the UAV.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
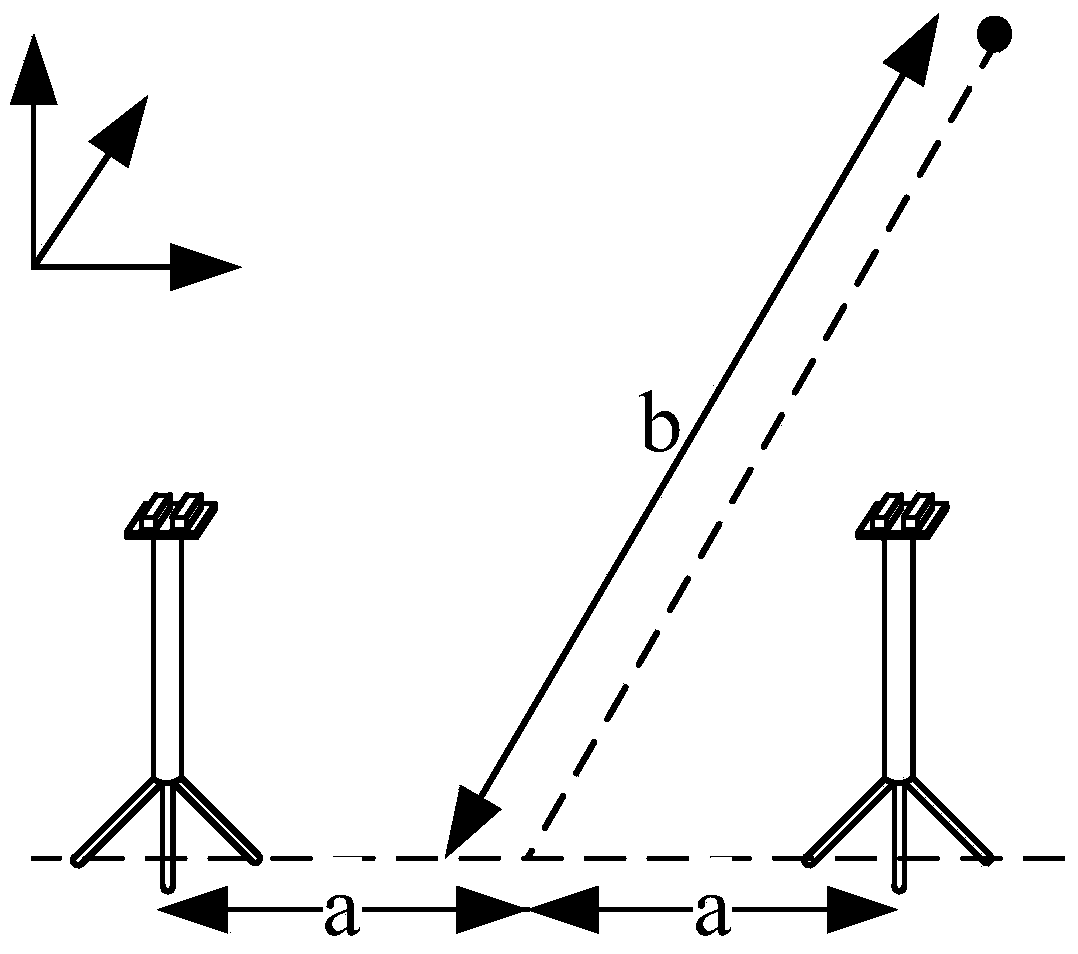
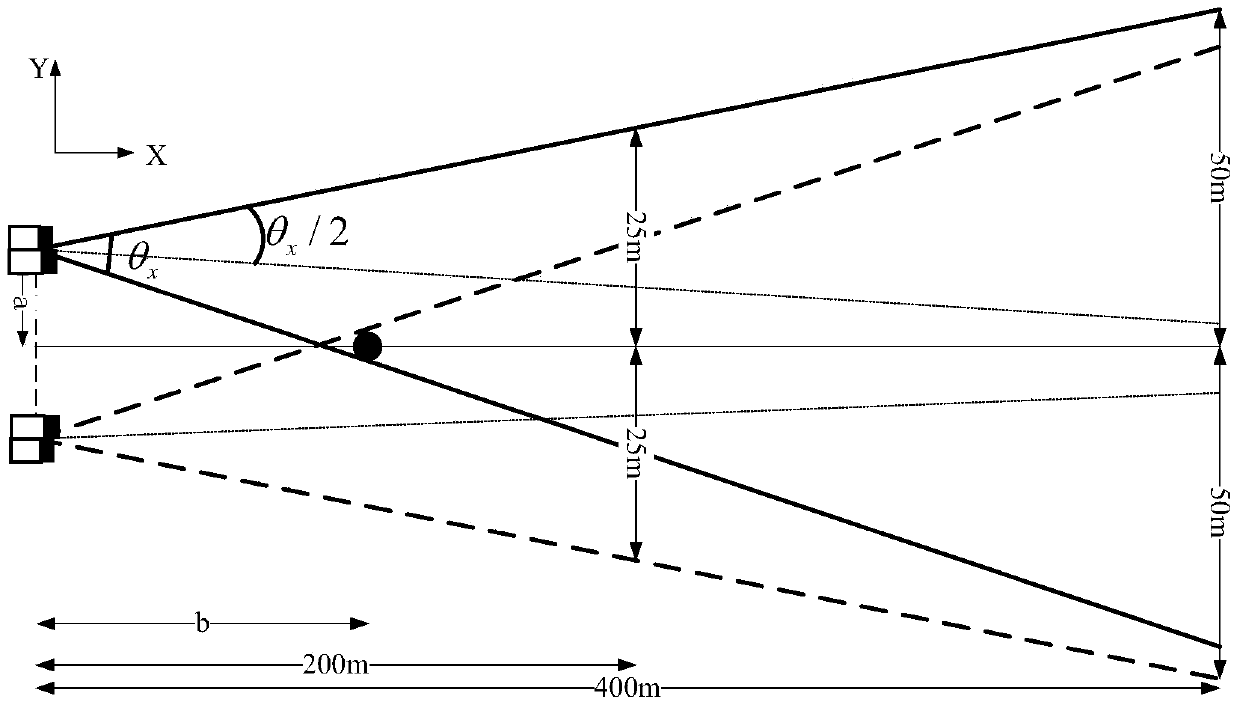
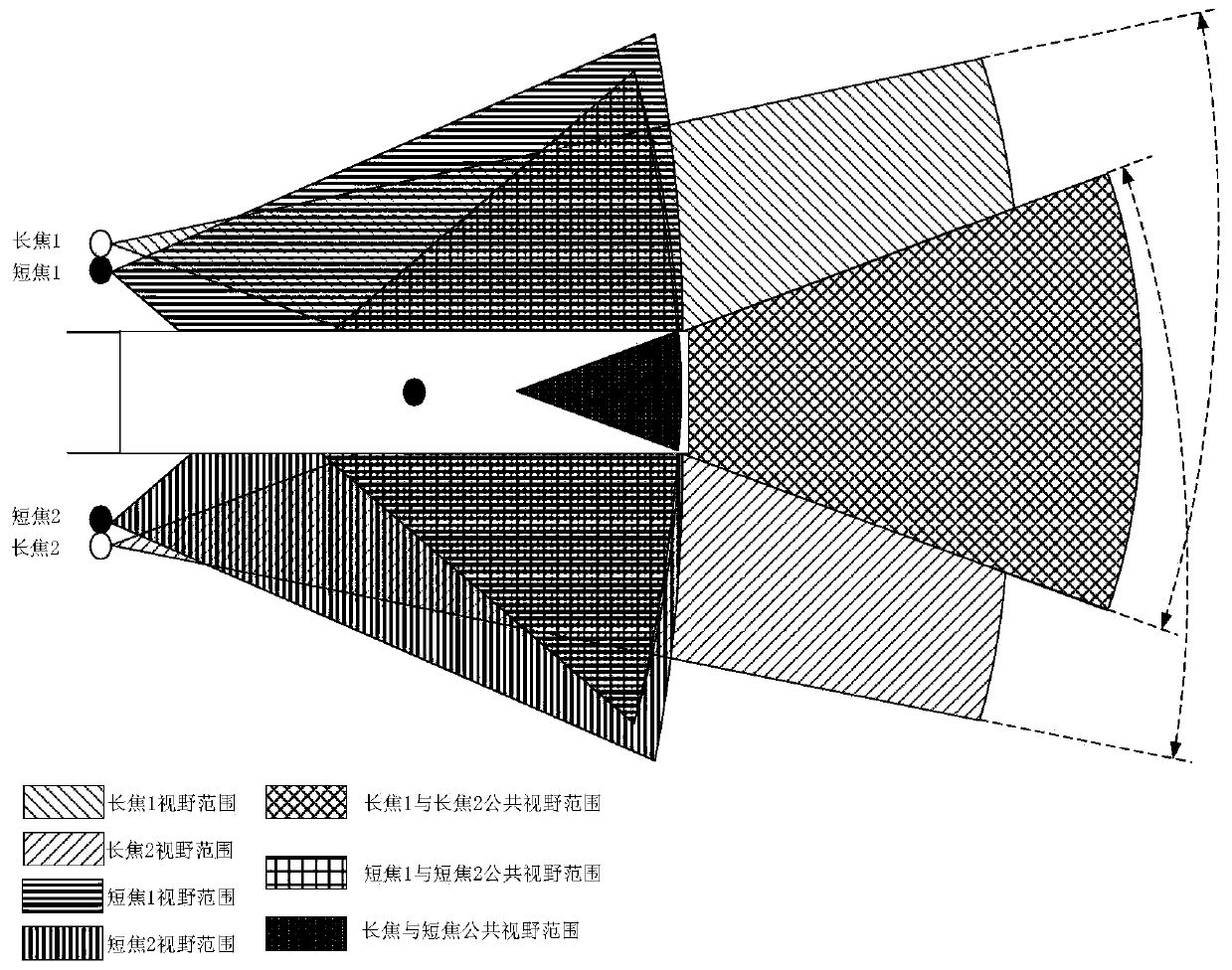
[0039] A vision-based autonomous landing guidance device for unmanned aerial vehicles, including a measuring camera, a visible light flashlight, a total station, a cooperation sign light, a tripod, a prism and a computer. There are 4 cameras, and its model is PointGrey Flea3-FW -03S1C / M-C high frame rate measurement camera, using 1 / 4 CCD sensor, frame rate up to 120Hz, resolution 640×480, camera size 3cm×3cm×6cm, camera base size 1cm×9cm ×11cm. Its installation location is as Figure 1-2 As shown, two of the measurement cameras are equipped with a 12mm telephoto lens for long-distance aerial UAV target detection and positioning, and two measurement cameras are equipped with an 8mm short-focus lens for precise taxiing positioning after the UAV enters the runway area; four The measurement cameras are divided into two groups, each group includes a long-focus measu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More