

A bidirectional motion estimation method and video frame rate up-conversion method and system
A two-way motion estimation and motion vector technology, applied in digital video signal modification, image communication, electrical components, etc., can solve the problem that the motion vector cannot completely and accurately reflect the motion state of the moving object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
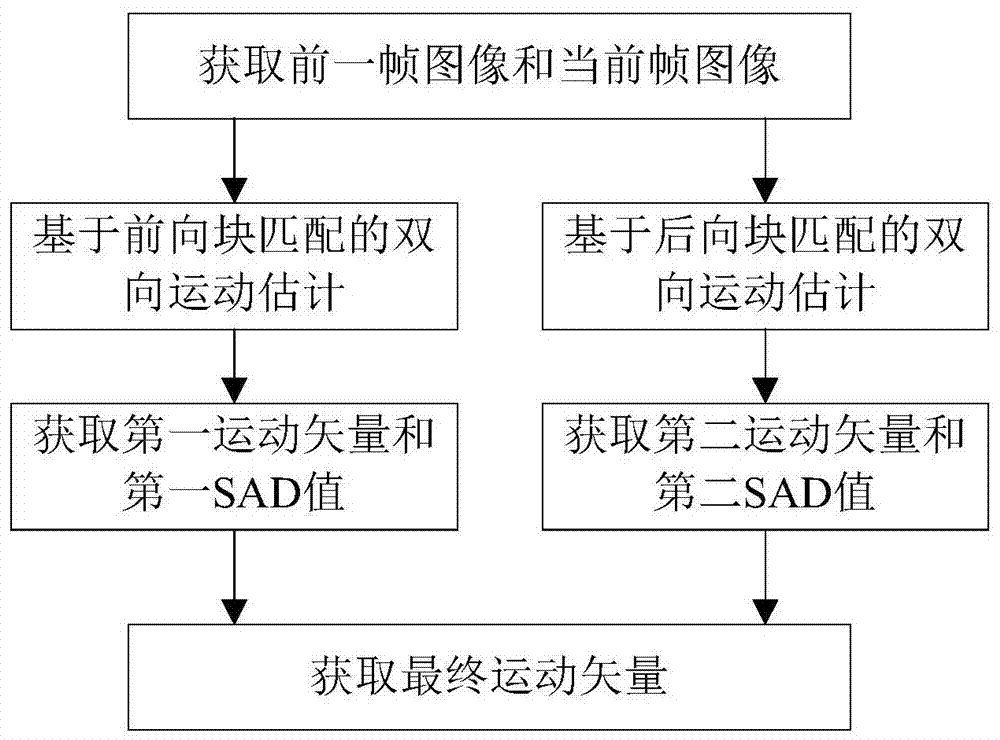
[0085] This embodiment provides a two-way motion estimation method, such as figure 1 shown, including the following steps:
[0086] S1: Read the previous frame image pre_img and the current frame image cur_img.
[0087] S2: Perform bidirectional motion estimation based on forward block matching according to the previous frame image and the current frame image, and obtain the first SAD value and the corresponding first motion vector, the first SAD value is a bidirectional motion based on forward block matching Estimate the smallest SAD value among all obtained SAD values.
[0088] Step S2 specifically includes the following steps:
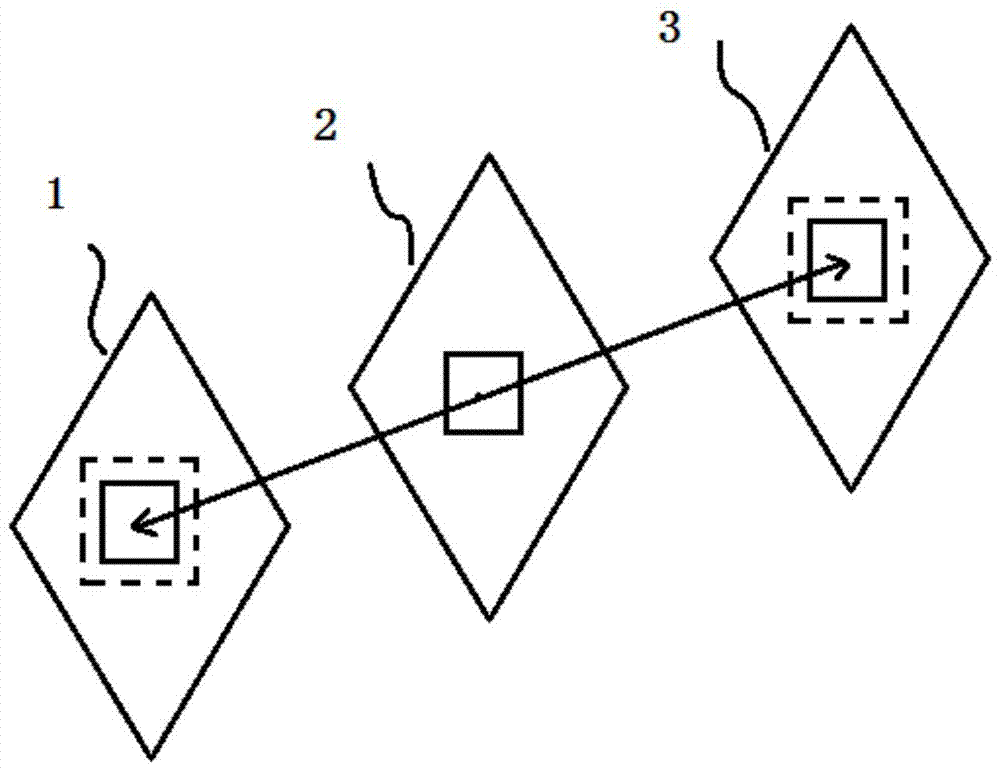
[0089] S21: Take out a 4x4 image block in the previous frame image pre_img, and perform similar block matching within the search range of + / -8 pixels in the current frame image cur_img. The search range is based on the coordinates of the upper left corner of the current image block. There are 8 pixels at the top, bottom, left, and right of the ce...
Embodiment 2
[0127] This embodiment provides a two-way motion estimation method. Embodiment 2 is a modification based on Embodiment 1. It differs from Embodiment 1 in that a is calculated in step S4 1 and a 2 the process of.
[0128] In step S4 of this embodiment, including calculating a 1 and a 2 The process is as follows:
[0129] When SAD 1 = SAD 2 = 0, a 1 =a 2 = 0.5;
[0130] When SAD 1 ≠0 and SAD 2 ≠0, a 1 =1-SAD 1 2 / (SAD 1 2 +SAD 2 2 ),a 2 =1-SAD 2 2 / (SAD 1 2 +SAD 2 2 );
[0131] of which SAD 1 is the first SAD value, SAD 2 is the second SAD value.
[0132]In the bidirectional motion estimation method described in this embodiment, after acquiring the previous frame image and the current frame image, respectively perform bidirectional motion estimation based on forward block matching and bidirectional motion estimation based on backward block matching, and then obtain The minimum SAD value and the corresponding motion vector are obtained to obtain the fi...
Embodiment 3
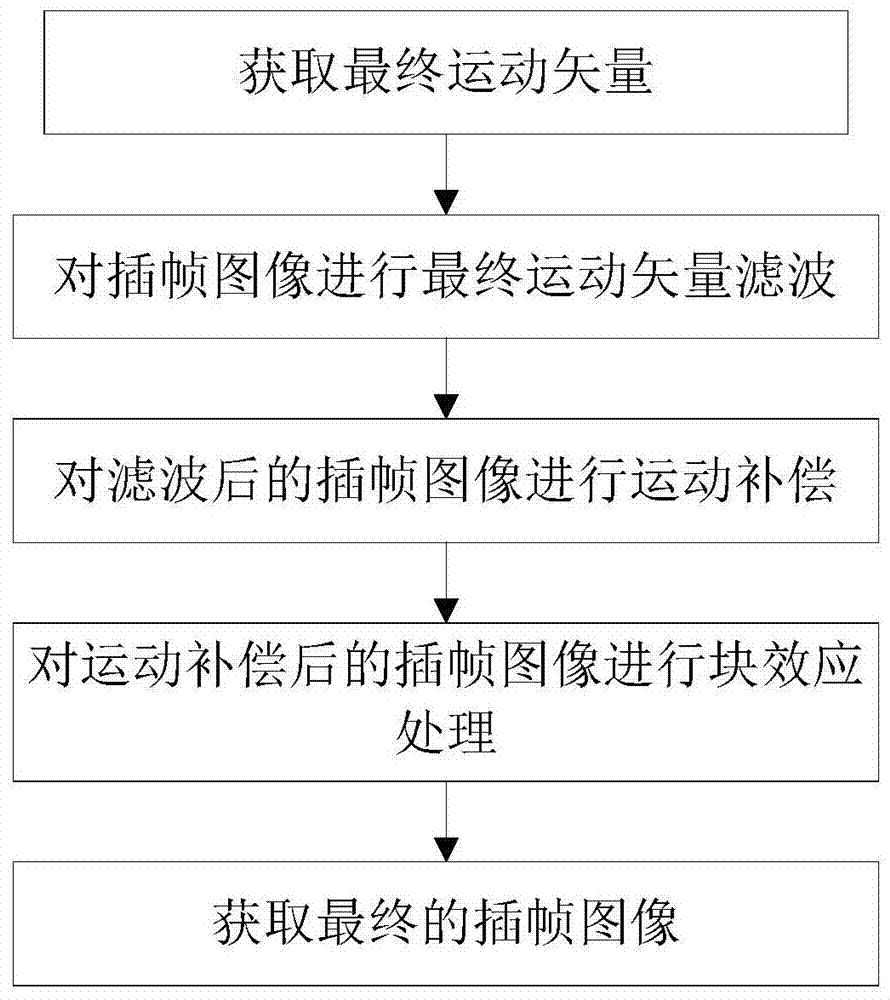
[0134] This embodiment provides a method for video frame rate up-conversion, such as image 3 shown, including the following steps:
[0135] T1: Obtain the final motion vector (mvx, mvy) by using the two-way motion estimation method described in Embodiment 1 or Embodiment 2. Assuming that the coordinates of the current image block in the interpolation image interp_img are (w, h), a total of 9 groups of final motion vectors (mvx1~mvx9, mvy1~mvy9 ). These 9 groups of final motion vectors are sequentially used as the motion vectors of the current image block.
[0136] T2: Perform final motion vector filtering on the interpolated frame image. Obtain the coordinates (w-mvx1~mvx9, h-mvx1~mvx9) of the current image block in the previous frame image pre_img and the current frame image cur_img according to the value of the motion vector, (w+mvx1~mvx9, h+mvx1~mvx9), And calculate the SAD values of these two image blocks. If there is a fractional part in the coordinates of the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More