Device and method for integrated navigation of deepwater robot
A combined navigation and robot technology, applied in navigation, surveying devices, surveying and navigation, etc., can solve the problems of deep-water robots' unsmooth navigation trajectory, unfavorable navigation control, and inability to eliminate acoustic propagation positioning errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
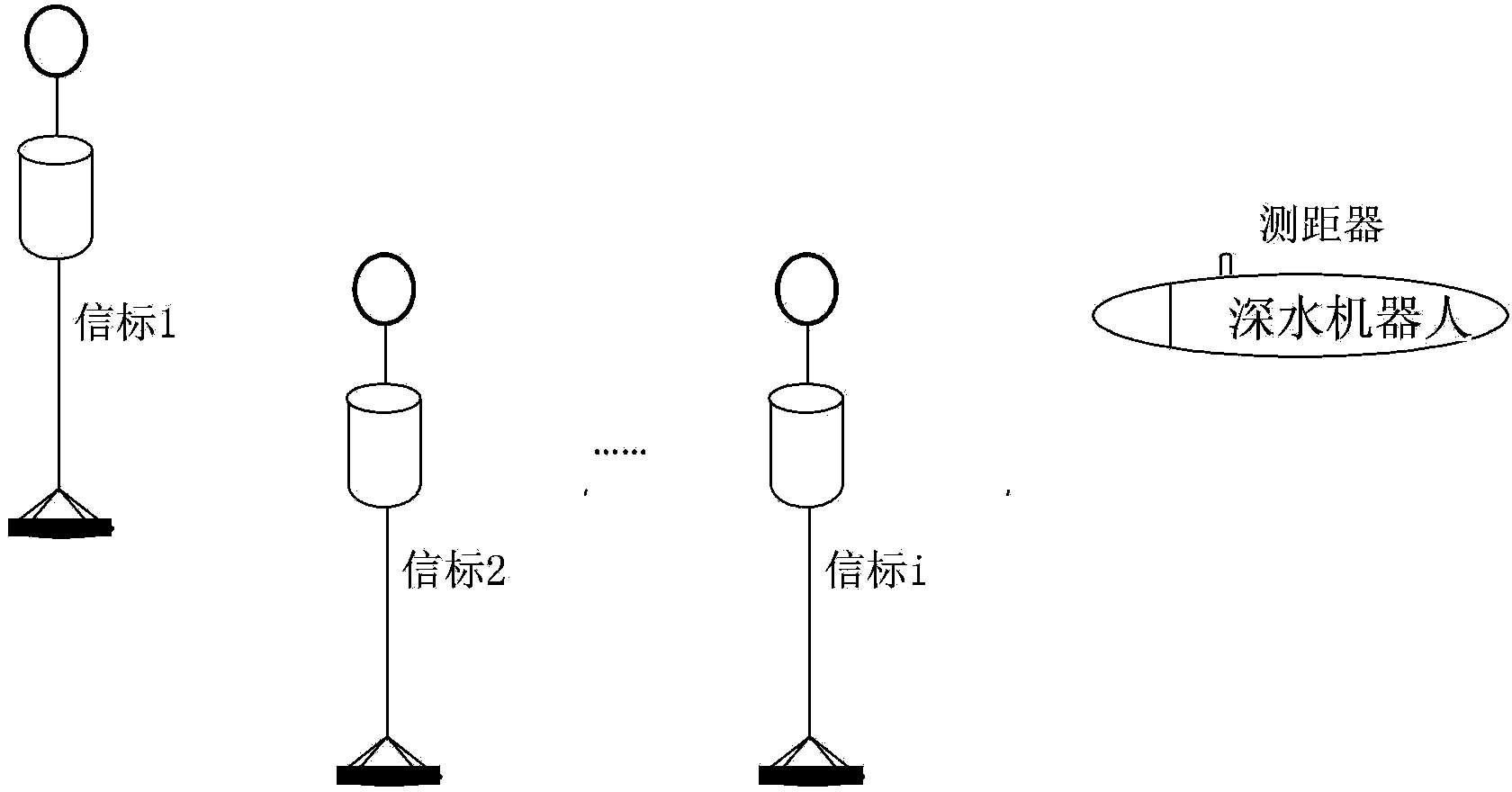
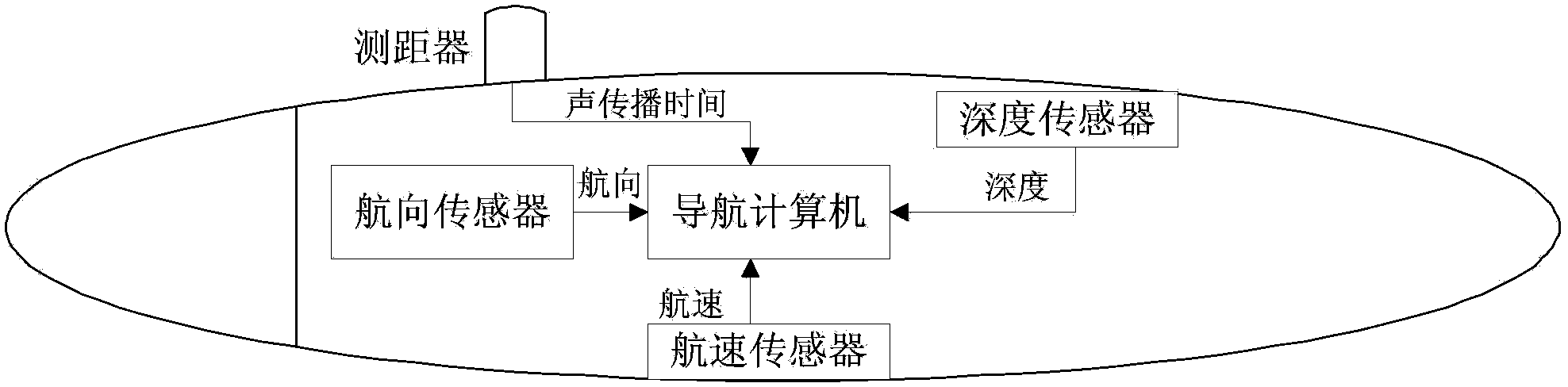
[0074] The present invention consists of not less than 3 beacons, range finders and deep water robots, such as figure 1 shown. The deep water robot navigation sensor configuration is as follows: figure 2 As shown, it consists of a rangefinder, a heading sensor, a speed sensor, and a depth sensor.
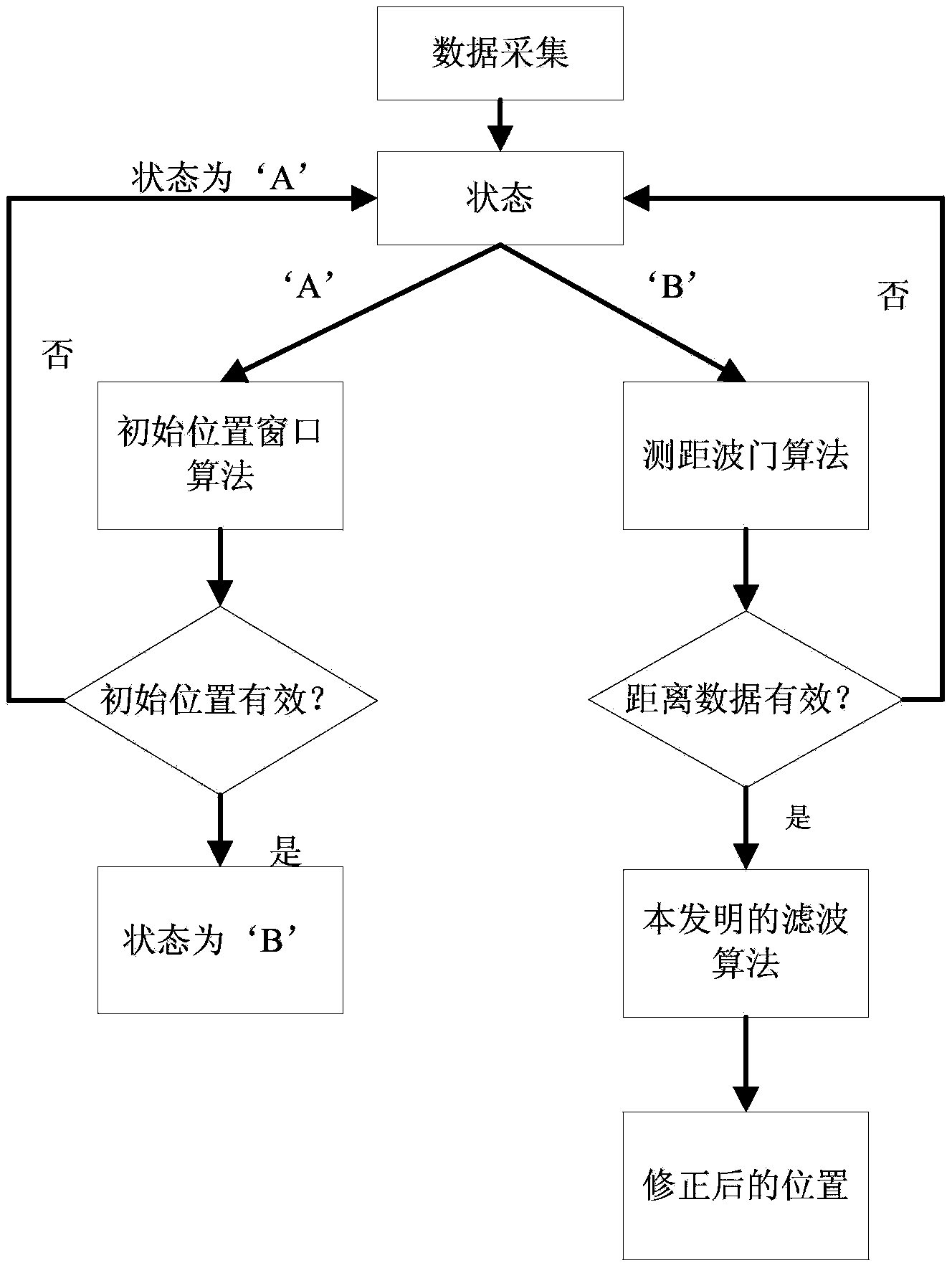
[0075] Combined navigation algorithm such as image 3 As shown, the deep-water robot performs data collection after launching, and the state is set to 'A'. When the distance measurement data is received, the initial position window algorithm of the present invention is used to calculate the initial position. After obtaining a valid initial position, the state is set to 'B', the filter algorithm designed by the present invention is started, and the position of the deep-water robot is corrected online by using the distance information. Before cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com