

MEMS gyroscope robust self-adaptation control method based on neural network upper bound learning
A robust self-adaptive, micro-gyroscope technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve problems such as model uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] In order to further explain the technical means and effects that the present invention adopts to achieve the intended invention purpose, below in conjunction with the accompanying drawings and preferred embodiments, a method based on adding robust items and feedback items in the control law proposed according to the present invention The micro-gyroscope robust adaptive control method is described in detail as follows.
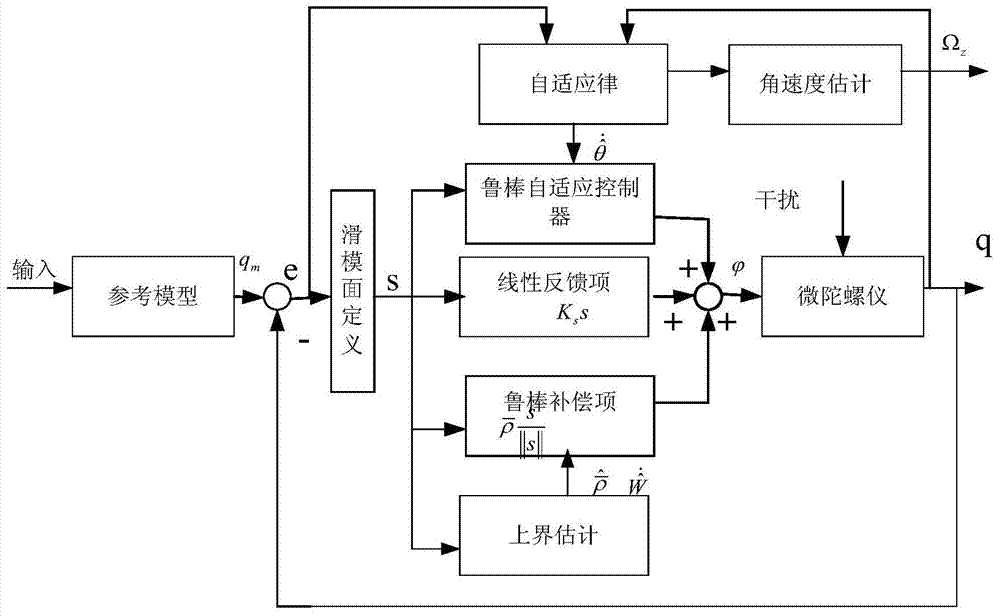
[0077] Such as figure 2 As shown, the robust adaptive control method of micro-gyroscope based on neural network upper bound learning includes the following steps:
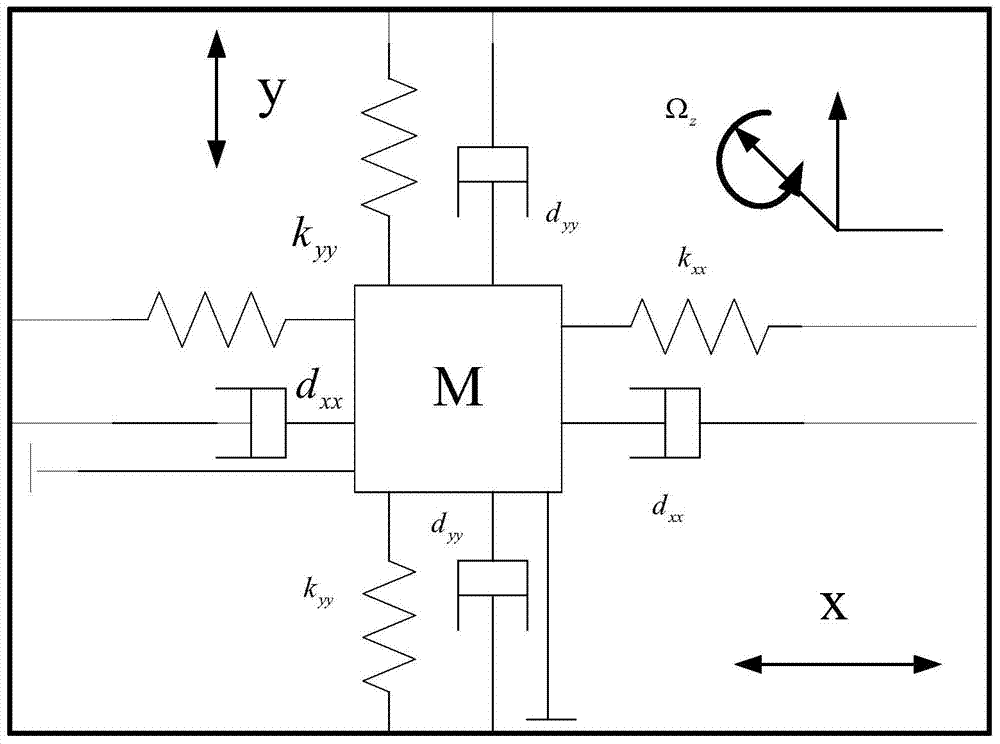
[0078] (1) Establish an ideal kinetic model
[0079] The design reference model is two sine waves of different frequencies: x m =A 1 sin(w 1 t), y m =A 2 sin(w 2 t), where w 1 ≠w 2 and both are zero,
[0080] x m ,y m are the positions of the micro-gyroscope along the driving axis and the sensing axis, respectively, A 1 , A 2 are the amplitudes of the micro-gyroscope in the dir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More