

Point-cloud feature point extraction method based on local sub-neighborhood division
A feature point extraction and local neighborhood technology, applied in computer components, image data processing, 3D modeling, etc., can solve the problem of large noise interference and achieve strong robustness, low complexity, and size insensitivity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] figure 1 The overall processing flow of the point cloud feature point extraction method based on local sub-neighborhood division is given, and the present invention will be further described below in conjunction with other drawings and specific implementation methods.
[0029] The present invention provides a point cloud feature point extraction method based on local sub-neighborhood division, the main steps are as follows:
[0030] 1. Initial feature point extraction
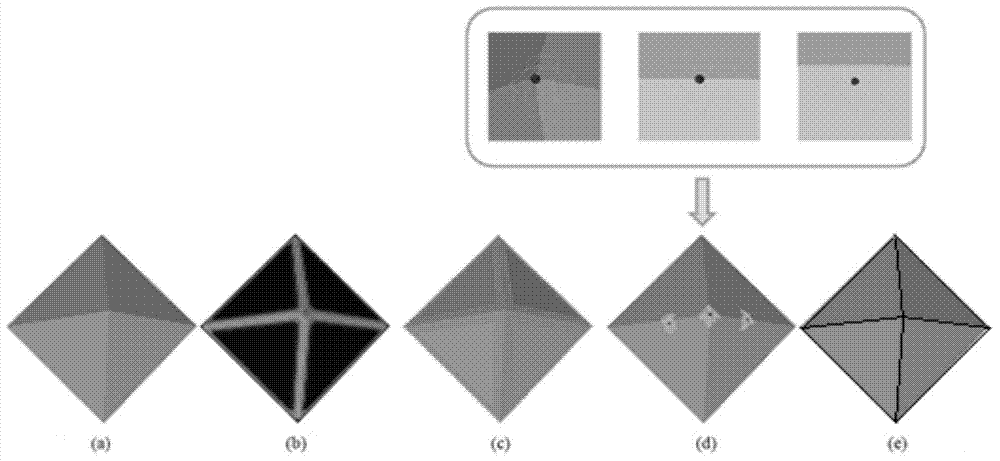
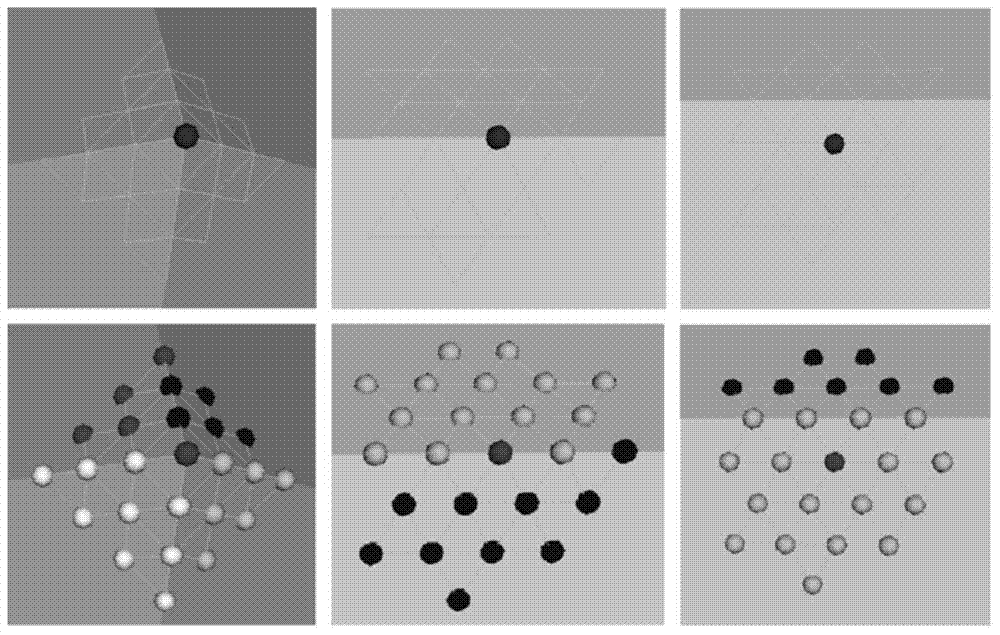
[0031] Record the input point cloud data as P={p 1 ,p 2 ,...p N},p i ∈ R 3 , for a point p ∈ P, calculate the probability σ of the point becoming a feature point through the covariance analysis of the local neighborhood p . This indicator measures the change of the local surface and reflects the feature information at a point. By setting an appropriate threshold, the initial feature points are screened. The present invention selects the K nearest neighbor as the local neighborhood, and selects K=...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More