

A lane line detecting and tracking and detecting method
A lane line detection and lane line technology, applied in the field of image processing, can solve problems such as weak robustness, high error rate on curves, and inability to deal with missing lane lines, achieving high accuracy and high recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
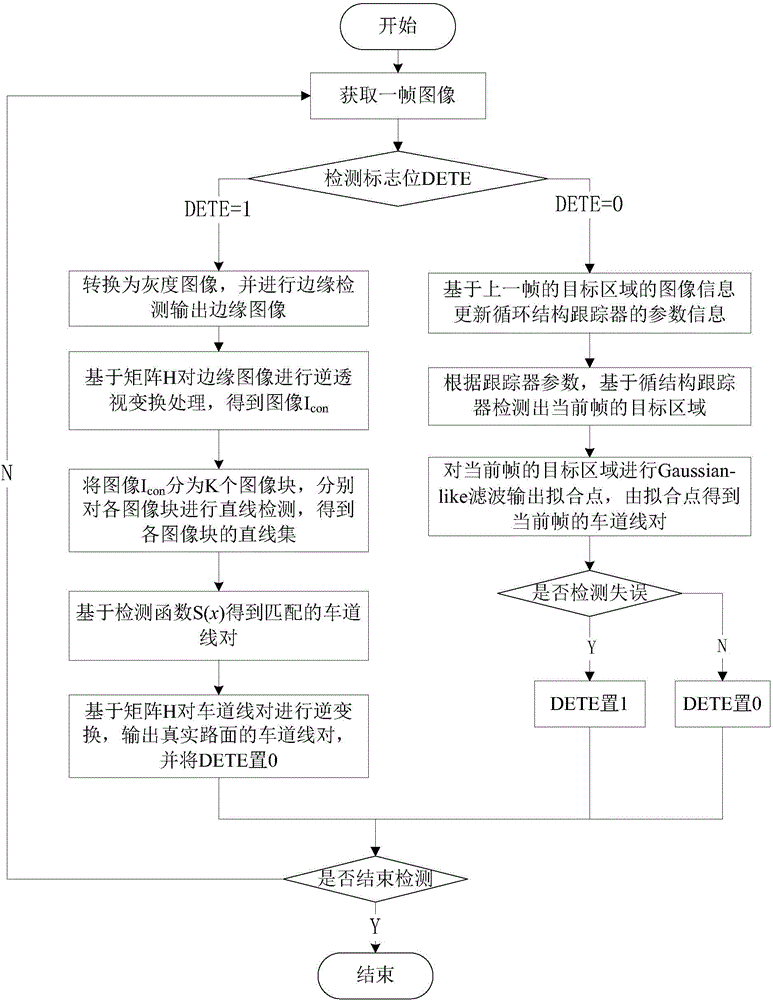
[0037] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the implementation methods and accompanying drawings.
[0038] First, use the camera to collect road video images to generate continuous video streams;
[0039] Then, based on the first N (N ≥ 2) frame images of the video image, the homography matrix H is obtained, based on the existing lane line detection processing steps, the coordinates of the disappearing line corresponding to each frame image are respectively determined, and then based on the preset Sliding window (the size of the window can be set based on the fineness of detection by itself, in this specific embodiment, the setting height is 5, and the width is 1), detect the ordinate area where N disappearing lines are most concentrated, and take the Any ordinate is the initialization disappearing line coordinates of the previous N f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More