

Window cleaning device
A technology of walking unit and control unit, which is applied in the field of intelligent robots, can solve the problems of misjudgment of borders, high price, easy jamming of boards or micro switches, etc., and achieve the goals of preventing misjudgment, high intelligence level, and reducing production costs Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
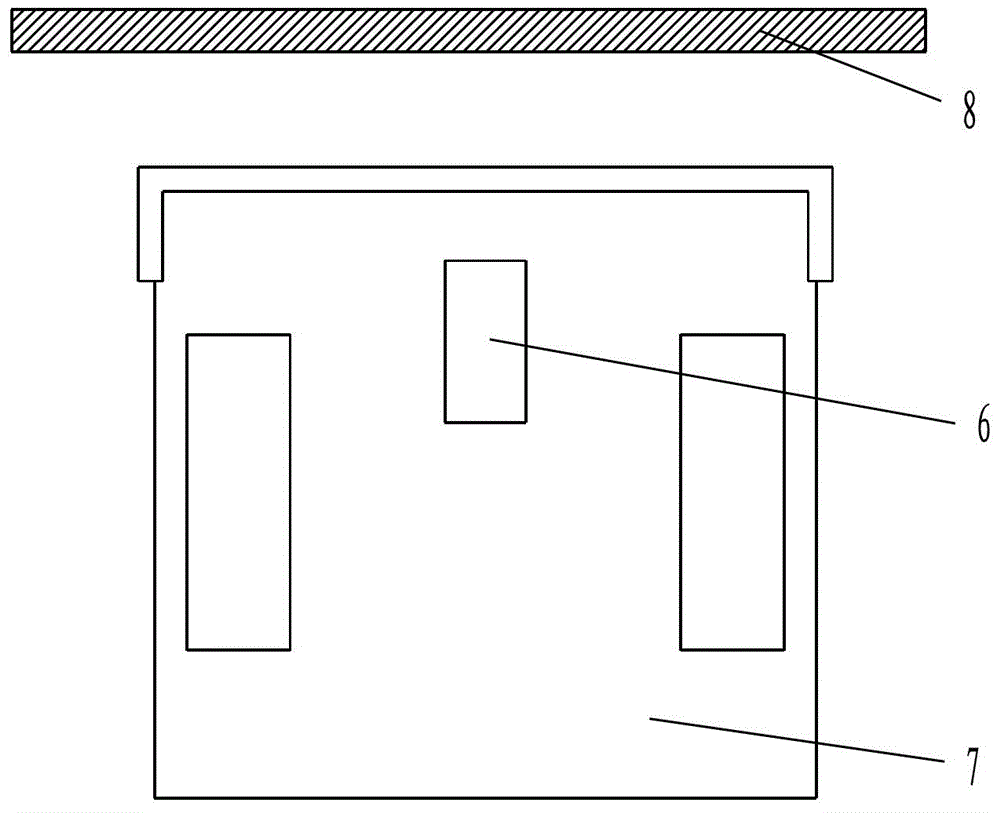
[0030] like Image 6 and Figure 7 As shown, in Embodiment 1, the traveling unit 2 is an adsorption turntable 17, and the window cleaning device 7 realizes twisting and traveling by alternately rotating the adsorption turntable. The body 16 of the window cleaning device 7 is provided with a control unit 5 , a driving unit 4 and a cleaning unit 3 . Wherein, the adsorption turntable is connected to the body 16 through a connecting piece, which can be a bearing or a central axis of rotation provided on the body, so that the adsorption turntable can be rotatably arranged at the bottom of the body 16 in various ways. For example, the adsorption turntable can be directly sleeved on its rotation center shaft, and the rotation center shaft is fixed at the bottom of the body to drive the adsorption turntable to rotate relative to the body. The adsorption turntable is, for example, made into an "I" shape, which is sleeved on the central axis of rotation. The synchronous belt is sleeve...
Embodiment 2
[0049] The main difference between Embodiment 2 and Embodiment 1 is that: the traveling unit 2 is a crawler belt or wheels, the window cleaning device 7 advances in a straight line, and the speed sensing unit 6 is a linear speed sensor.
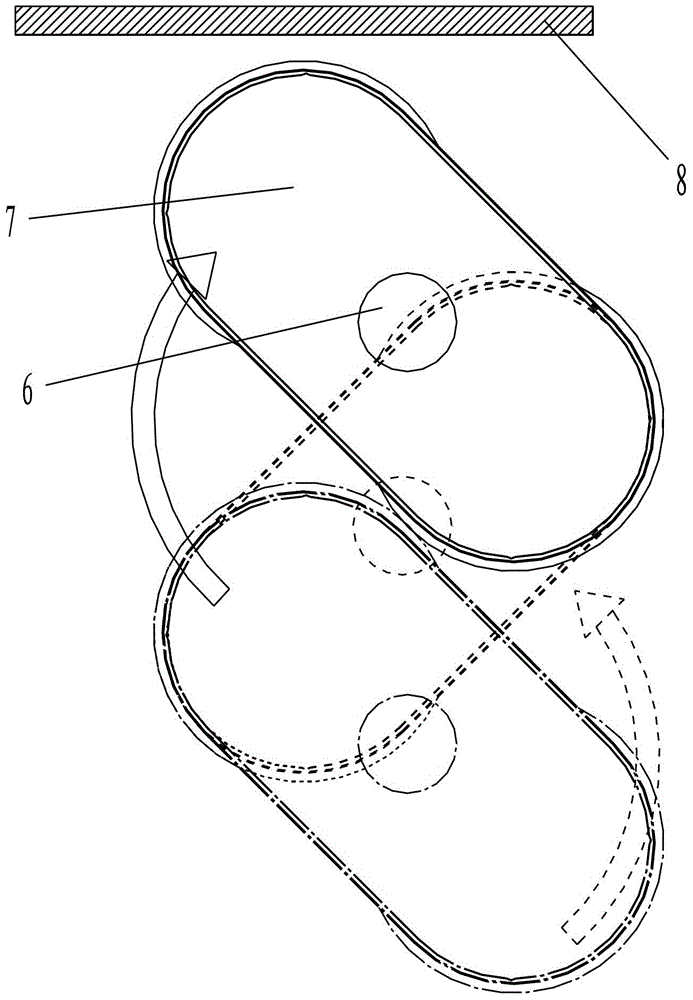
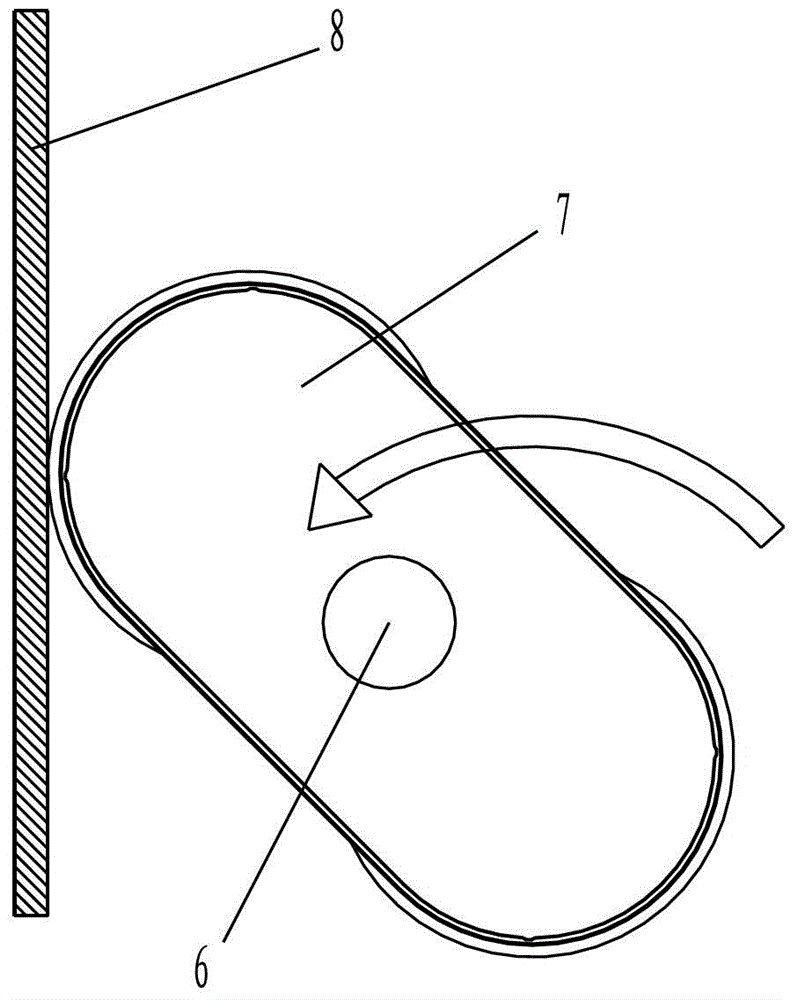
[0050] like image 3 As shown, when the window cleaning device 7 is in normal operation, the body line speed of the window cleaning device 7 does not change or changes very little, and the speed value measured by the line speed sensor is v 1 ;like Figure 4 As shown, when the window cleaning device 7 hits the window frame 8, the linear velocity of the window cleaning device 7 advances to 0 in a short time. Therefore, a built-in threshold v can be preset in the control unit 0 =0 or a smaller value close to 0, the line speed sensor sends the speed value signal of the sensed real-time line speed v to the control unit 5, when v≤v 0 , the control unit 5 judges that the window cleaning device 7 has reached the frame, and the control unit 5 contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More