

Robot arrangement and method for controlling a robot
A technology of robots and personnel, applied in the field of robotics, can solve the problems of personnel injury risk, personnel danger, etc., and achieve the effect of reducing the risk of injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In the examples described below, the described components of the robot arrangement and the described steps of the method each represent an individual, mutually independently observed feature of the invention, which also respectively improve the invention independently of each other and thus also These are to be considered as part of the invention individually or in combinations other than those shown. Furthermore, the described embodiments can also be supplemented by other features of the invention that have already been described.
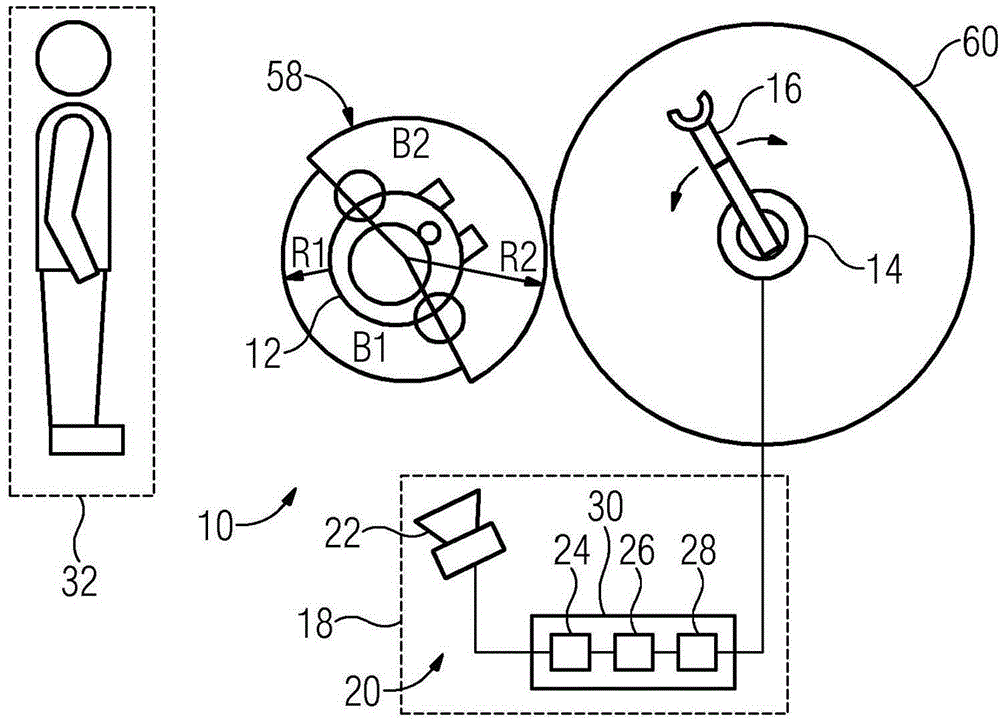
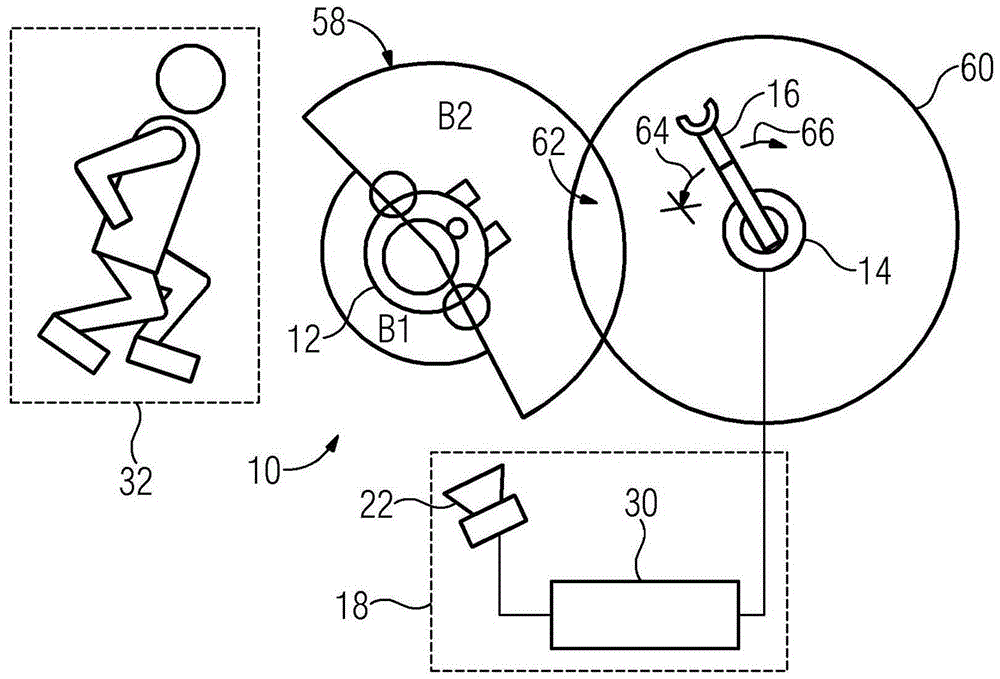
[0031] figure 1 A top view of a working area 10 is shown, in which a person 12 and a robot 14 are located. The robot arm 16 of the robot 14 is swiveled during the working process by a drive (not shown) of the robot 14 . The person 12 also has to remain in the working area 10 during the working process, for example, because it passes workpieces to the robot arm 16 or takes workpieces from the robot arm. Therefore, the robot 14 and the per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More