A robot joint with variable stiffness
A technology of robot joints and robots, applied in the field of robots, to achieve the effect of strong practicability, simple structure and small pre-tightening force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
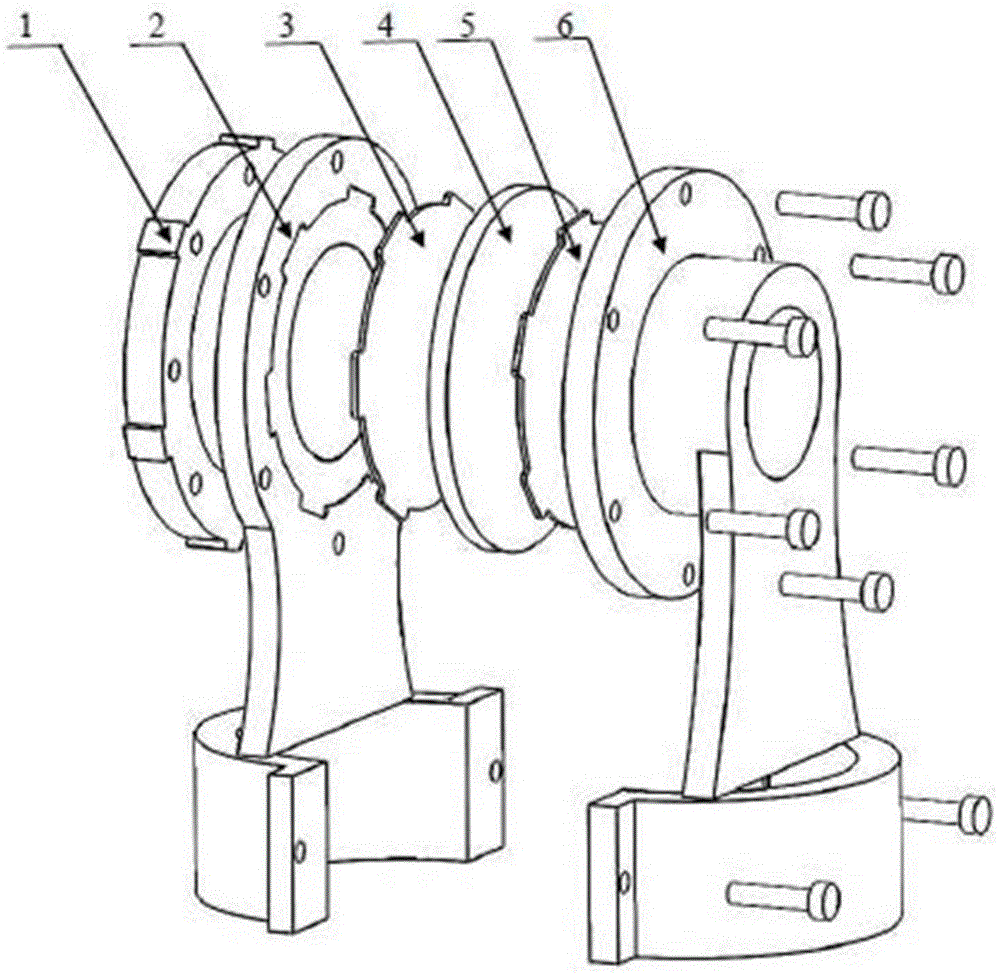
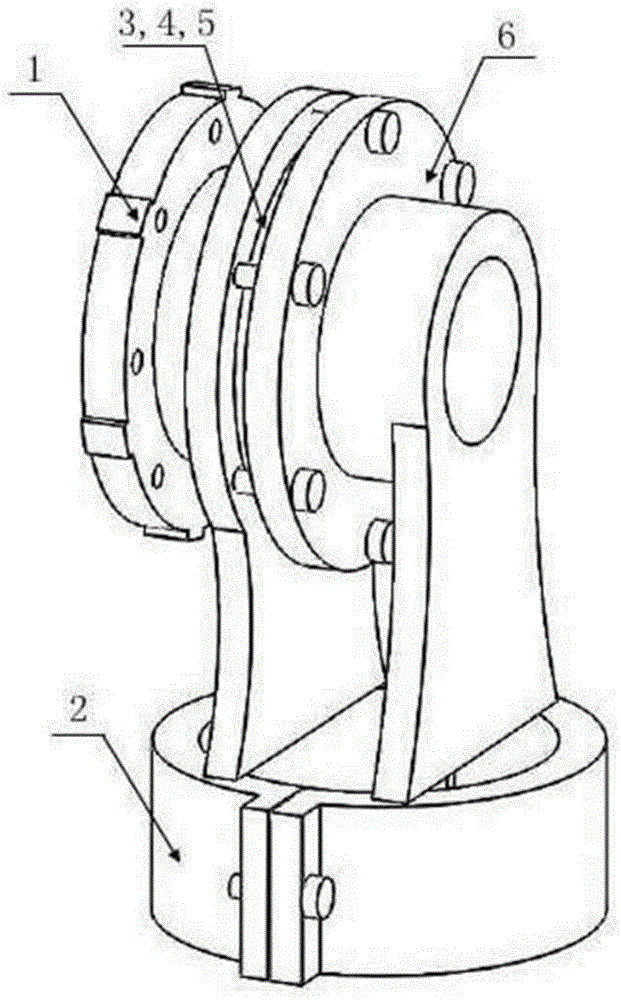
[0029] see figure 1 , the robot joint with variable stiffness, including the transition end 1, the transition end 1 is located in the next link of the reducer in the robot joint transmission chain, and plays the role of connecting the reducer and the output end-2, and transmits the motion of the reducer, which is the joint motion input terminal. The auxiliary friction plate 3 is connected with the output end 1 of the reducer through the concave surface and the external teeth, the auxiliary friction plate 5 is connected with the output end 2 6 through the concave surface and the external teeth, and the main friction plate 4 is clamped between the auxiliary friction plate 3 and the auxiliary friction plate 5, wherein the right side of the auxiliary friction plate 3 is attached to the left side of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More