

Bionic multi-foot walking robot and robot leg
A walking robot and robot leg technology, applied in the field of robotics, can solve problems such as increased control complexity and complex robot structure, and achieve the effects of improving environmental adaptability, improving stability, and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
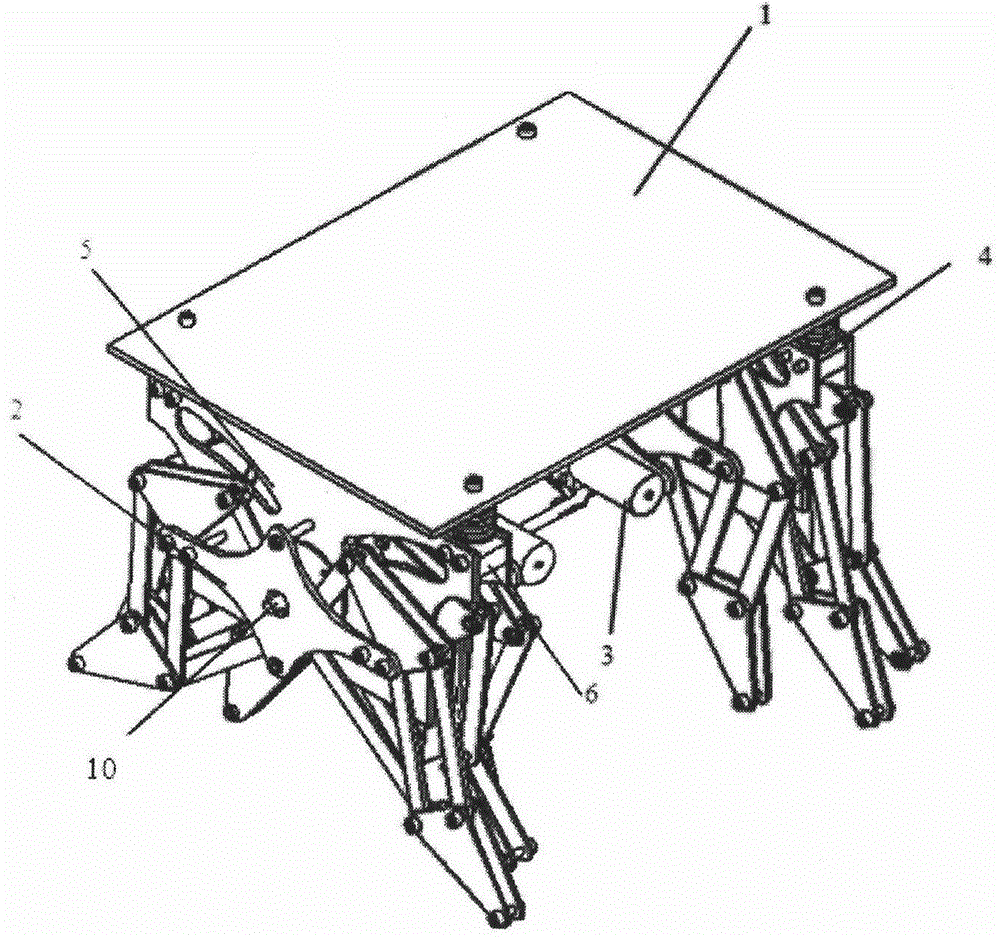
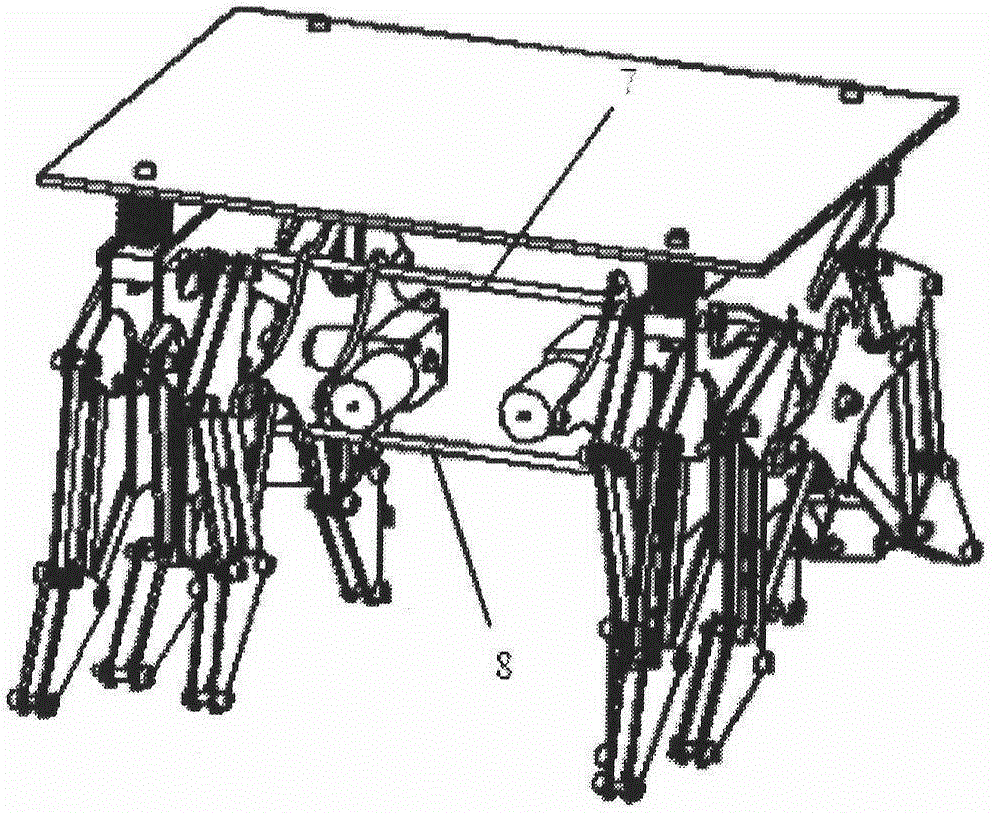
[0028] The multi-legged bionic robot is composed of a walking device and a robot main body arranged above the walking device. The walking device is a first and second walking unit set opposite to each other. See attached Figure 1(a ) Is the outline drawing of the robot. The walking unit set includes multiple sets of paired robot legs arranged side by side. From the outside to the inside, they are the first robot leg, the second robot leg, and the third robot leg. The number of robot legs can be set according to requirements. Features.
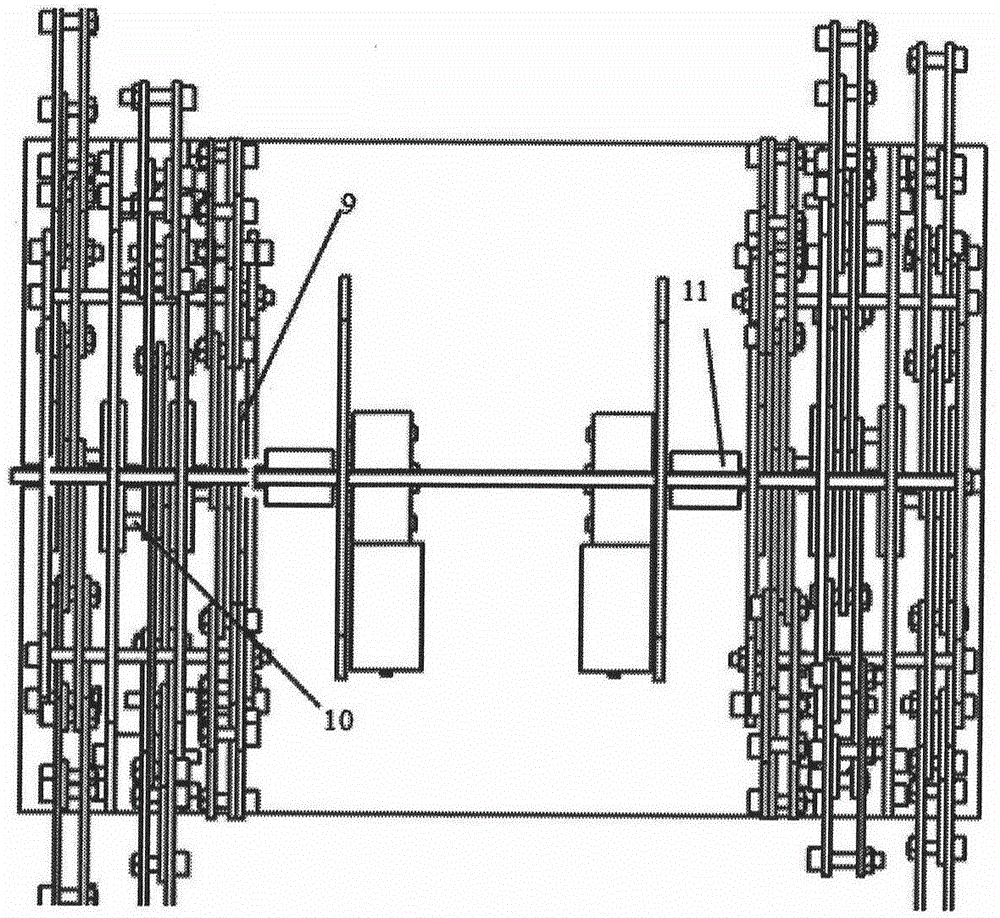
[0029] See attached image 3 A schematic diagram of the structure of a pair of legs of the robot. The leg mechanism of the robot consists of a transmission plate 9, a cross plate 2, a connecting plate 12, a transmission rod 13.1, a transmission rod 13.2, a transmission rod 13.3, a transmission rod 13.4 and a foot plate 14.
[0030] A transmission disc, the transmission disc is plate-shaped, the center is provided with a transmission connection hole ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More