

Hook rod gear mechanism for parallel shaft transmission
A gear mechanism, parallel shaft technology, applied in the direction of transmission, gear transmission, belt/chain/gear, etc., can solve the problem that the parallel shaft transmission mode of mechanical transmission cannot be realized, and the movement and power transmission of two parallel shafts in the plane cannot be realized. , use scope restrictions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
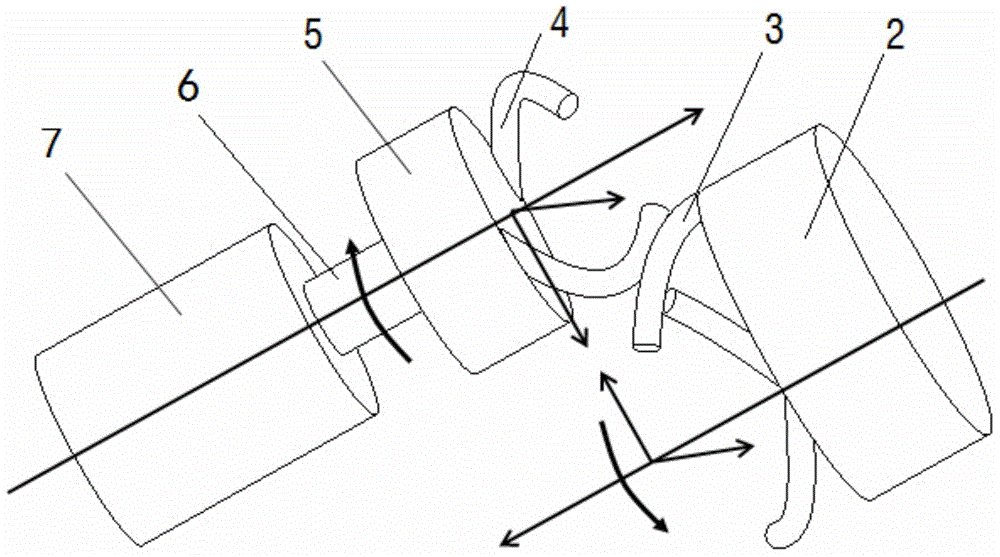
[0050] Embodiment 1: The present invention provides a hook gear mechanism for parallel shaft transmission, which adopts a parallel shaft external meshing transmission mode, such as figure 1 As shown, including driving wheel 5 and driven wheel 2, driving wheel 5 and driven wheel 2 form a pair of transmission pairs, driving wheel 5 is connected to input shaft 6, driven wheel 2 is connected to output shaft, that is, driven wheel 2 is connected to the driven wheel through the output shaft The loads are connected; the axes of the driving wheel 5 and the driven wheel 2 are parallel to each other.
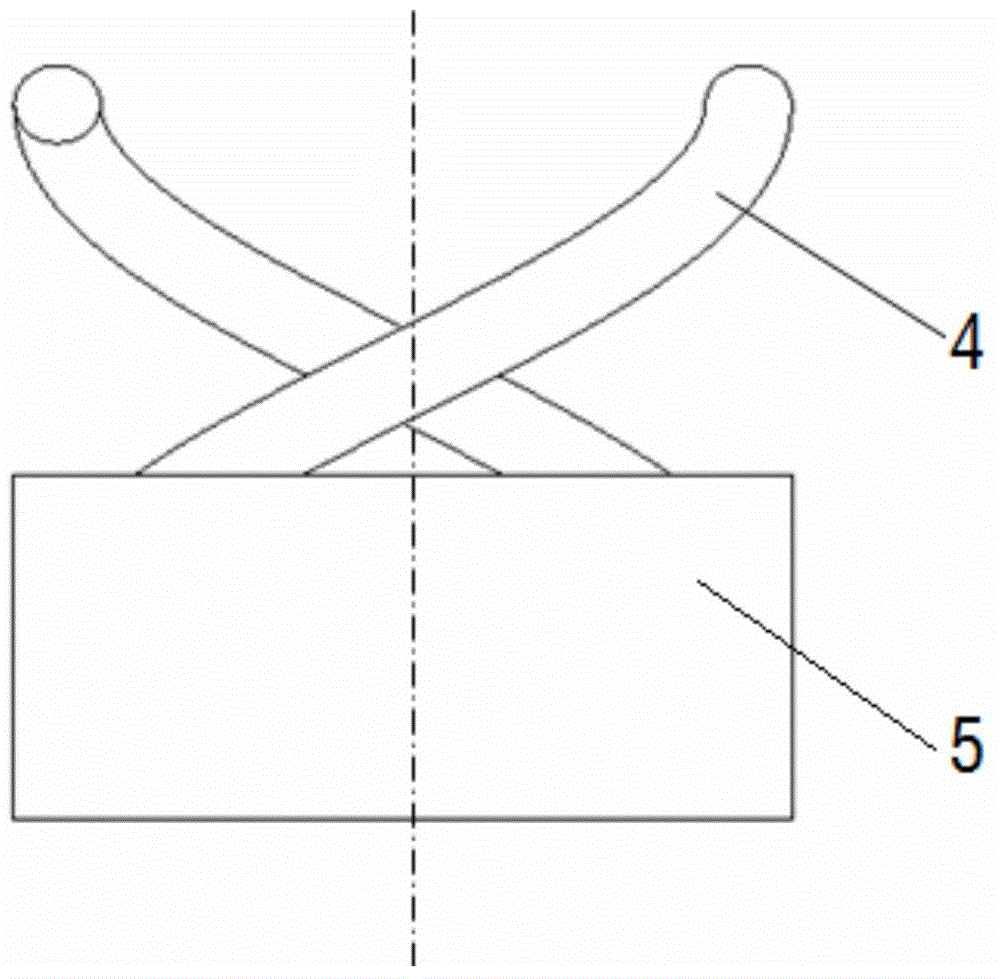
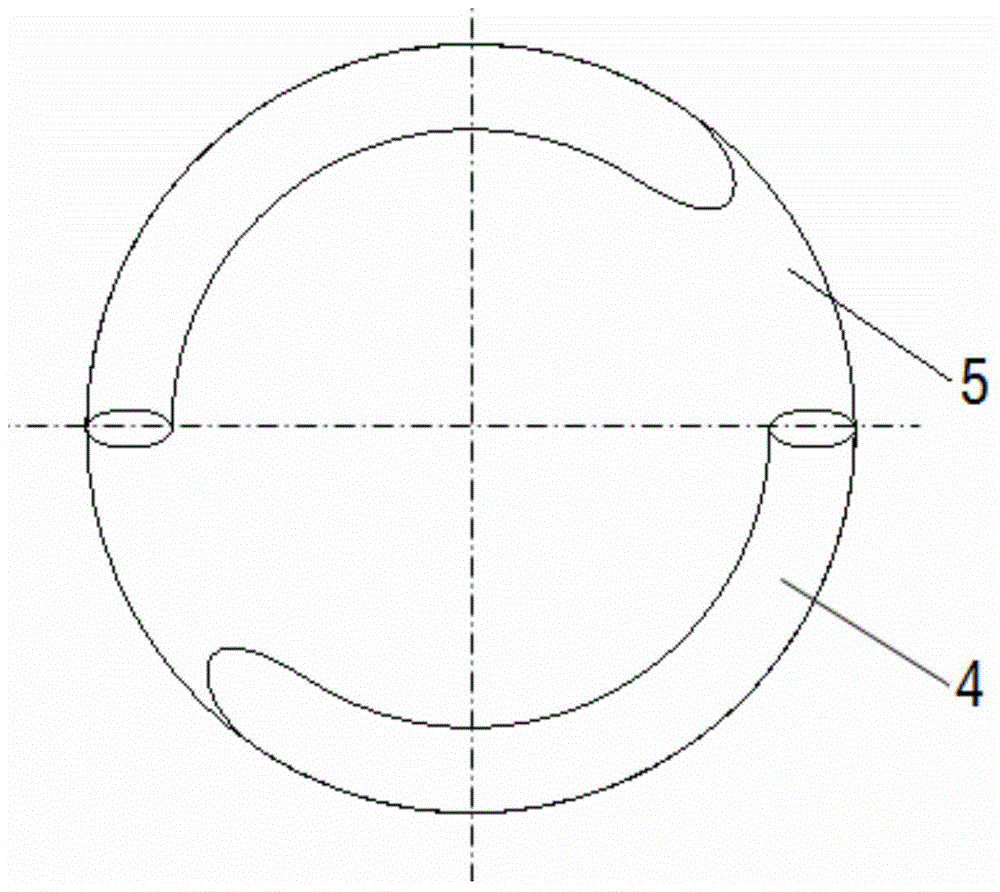
[0051] see figure 2 , 3 , 4, the driving wheel 5 is provided with a driving hook 4, the driven wheel 2 is provided with a driven hook 3, the driving hook 4 and the driven hook 3 have the same diameter, and the driving hook 4 is evenly distributed on the driving wheel 5. In the circumference on the end surface of the cylinder, the driven hook 3 is also evenly distributed on the circumfe...
Embodiment 2
[0077] Embodiment 2: A hook gear mechanism for parallel shaft transmission of the present invention is applied to a reducer in which the input shaft and the output shaft rotate in the same direction using the parallel shaft internal meshing transmission mode. Such as Figure 7 As shown, when in use, the angular velocity vector angle θ=0° of the main and driven wheels, the rotation direction of the input shaft 1 and the output shaft 6 are the same, the driving wheel 5 is installed on the input shaft 6 of the driver 7, and the driven wheel 2 is installed on the output shaft 6. on axis 1. At this time, the axial distance between the input shaft 1 and the output shaft 6 is the helical radius of the driven hook lever minus the helical radius of the driving hook lever. There are two driving hook bars 4 on the driving wheel 5 described in this embodiment, and three driven hook bars 3 are arranged on the driven wheel 2. When the driver 7 drives the driving wheel 5 to rotate, because ...
Embodiment 3
[0082] Embodiment 3: A hook gear mechanism for parallel shaft transmission according to the present invention is applied to a reducer in which the input shaft and the output shaft rotate in the same direction using the parallel shaft internal meshing transmission mode. its structure and Figure 7 are basically the same, the only difference is that the number of active hook levers is 1, the number of driven wheel hook levers is 8, m=3mm, n=2mm, transmission ratio i 12=8, the interaxial distance a=21mm, the diameter D of the driving and driven hook rods is 2mm, it can be calculated that the diameter of the driving wheel cylinder in this embodiment is 8mm, and the diameter of the driven wheel cylinder is 50mm.
[0083] A hook gear mechanism for parallel shaft transmission of the present invention can be used in micro-machines and micro-mechanical devices to provide a mechanism for continuous and stable meshing transmission between two parallel shafts in a plane and a transmission...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More