

Flexible spacecraft underactuated system based on switching control method and attitude control method thereof
A flexible spacecraft and attitude control technology, applied in the direction of attitude control, can solve the problem of less research on the attitude control of flexible underactuated spacecraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described below in conjunction with the accompanying drawings.
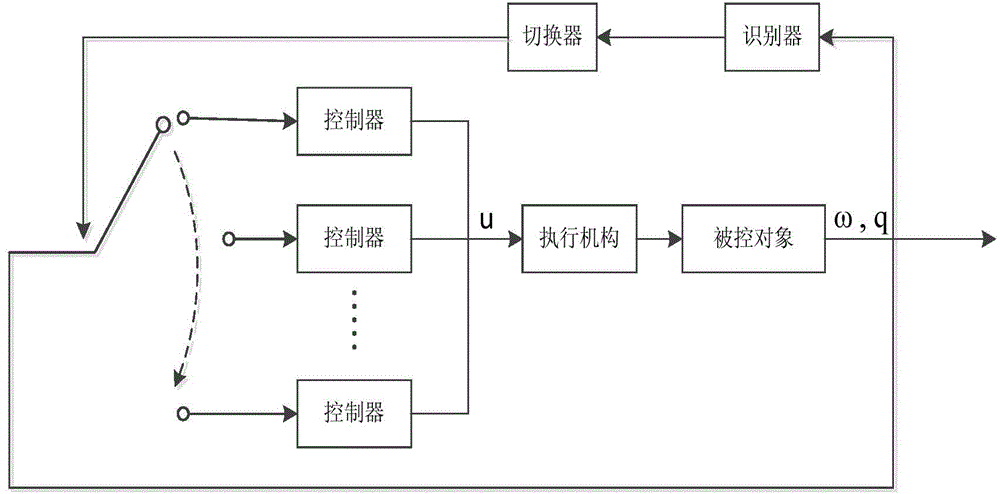
[0062] An underactuated control system for a flexible spacecraft based on a switching control method, such as figure 1 As shown, it includes a recognizer, a switcher, an underactuated controller, an actuator, a selector switch and an attitude control system, and the selector switch includes an input terminal and more than one connection terminal; the recognizer, switcher, selector switch, The underactuated controller, the actuator, and the attitude control system are sequentially connected, and at the same time, the input end of the recognizer is connected to the output end of the attitude control system to form a closed-loop attitude control system, wherein:
[0063] The recognizer is used to identify the attitude and angular velocity output by the attitude control system, and judge the control torque of the two axes in the inertial spindle according to the recognized...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More