

Wheeled mobile robot trace tracking control method based on energy saving consideration
A mobile robot, trajectory tracking technology, applied in two-dimensional position/channel control and other directions, can solve problems such as not being well solved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0078] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
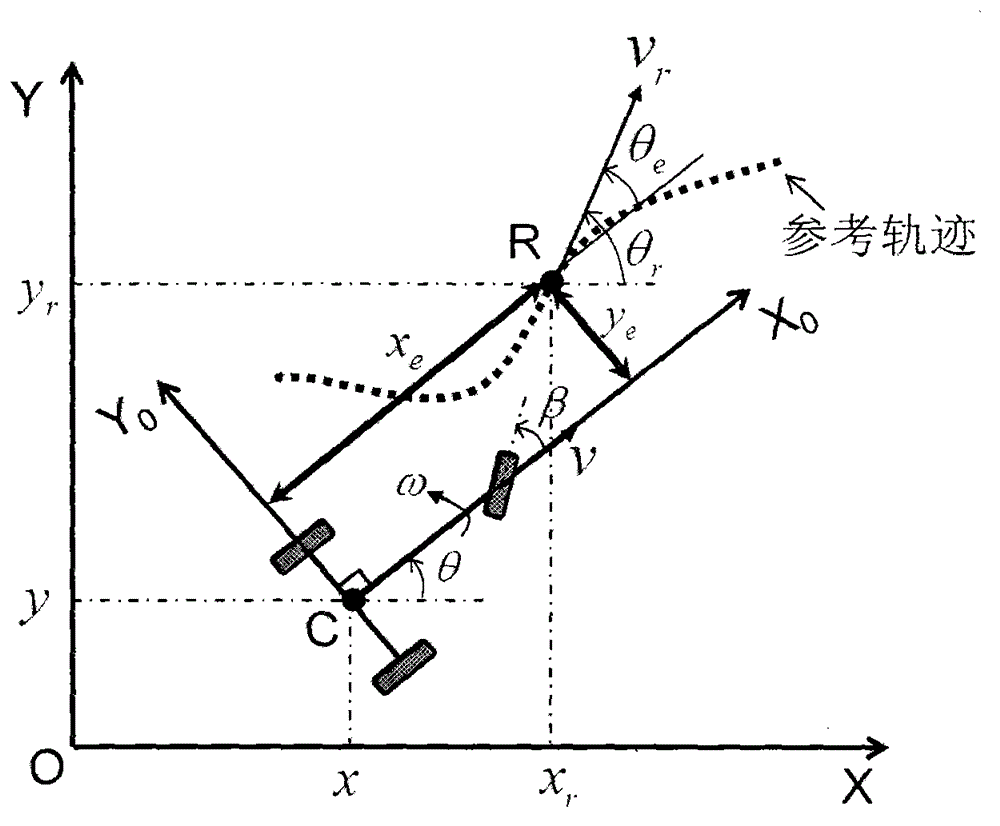
[0079] Such as figure 1 As shown, a three-wheeled wheeled mobile robot is used in the embodiment of the present invention, and its front wheels are both steering wheels and driving wheels, which are respectively realized by a steering motor and a driving motor. exist figure 1 In the trajectory tracking schematic diagram shown, x and y represent the position coordinates of the wheeled mobile robot, θ represents the azimuth of the vehicle body; the current actual pose of the wheeled mobile robot is expressed as p c (t) = [x(t) y(t) θ(t)] T , the reference pose given by the path planning algorithm is denoted as p r (t)=[x r (t) y r (t) θ r (t) T ; Pose error is p e (t)=[x e (t) y e (t) θ e (t)] T ;The actual speed of the car body at the current moment is q(t)=[v(t) ω(t)] T , the reference velocity is q r (t)=[v r (t) ω r ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More