

Coaxial double-rotor unmanned helicopter modeling method based on optical cable laying
An unmanned helicopter and coaxial dual-rotor technology, applied in the aviation field, can solve problems such as complex modeling methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0129] Example 1: Dynamic modeling method of flexible optical cable under constant tension release state
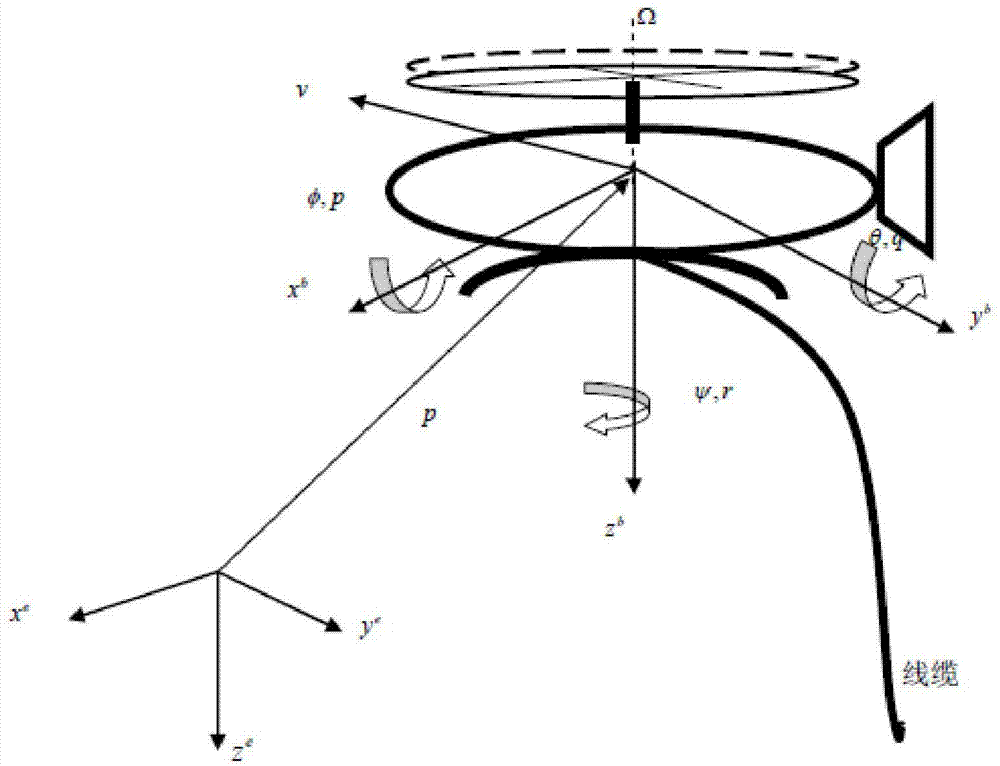
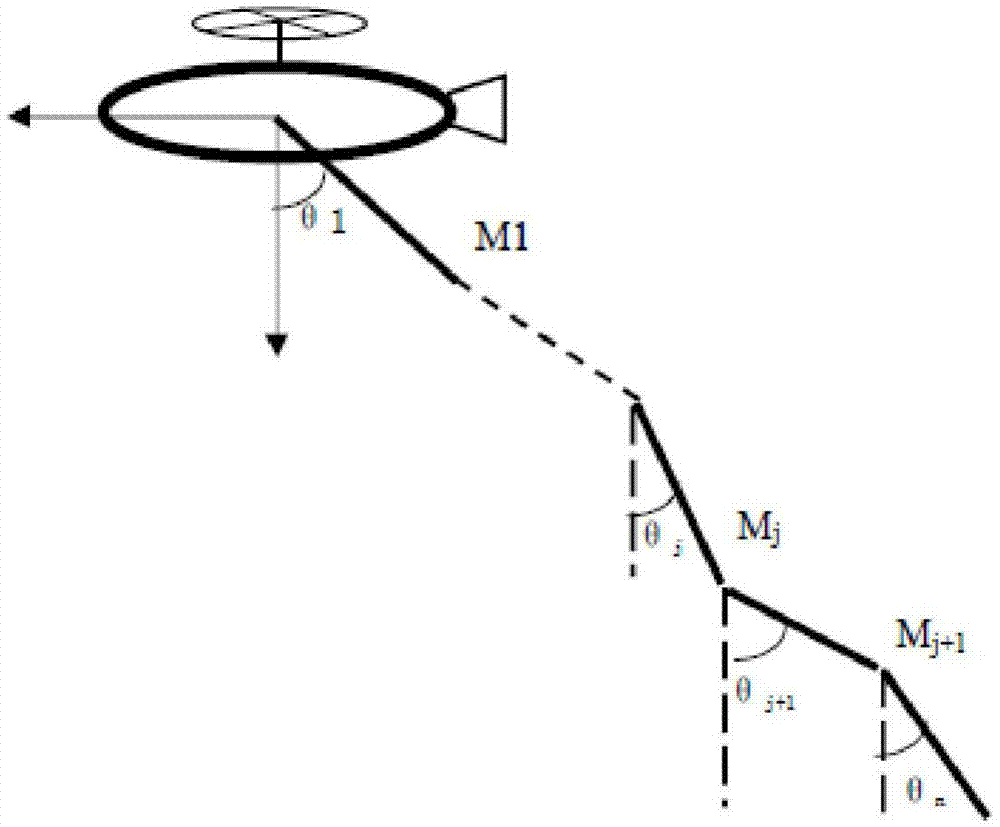
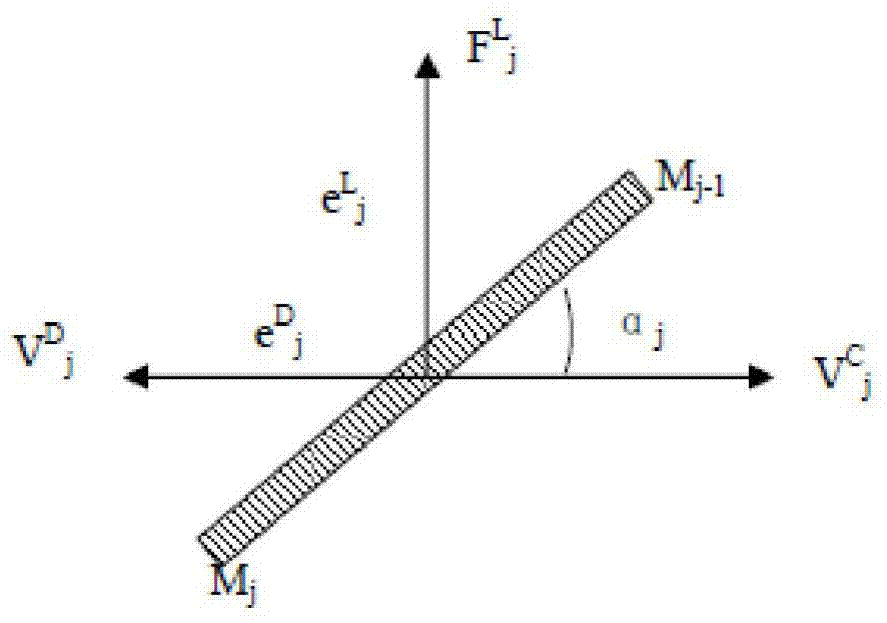
[0130] Since one end of the optical cable is fixed on the helicopter platform and the other end is a free end, the optical cable is released under the control of the constant tension release device under the condition that the tension of the optical cable is constant. Therefore, when we analyze the force of the optical cable, one end of the optical cable can be considered as a fixed end, and the fixed end is stationary or moving at a constant speed. At the same time, in order to use the multi-rigid body system dynamics method to describe the motion of the optical cable, set:
[0131] e) The entire optical cable to be laid is composed of N optical cable segments;
[0132] f) Each segment is released from the release mechanism one by one, and the speed of the cable segment being released is consistent with the speed of the cable segment just released;
[0133] g) Each fib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More