

Robot hand-eye stereo vision measurement method
A technology of stereo vision measurement and robotics, applied in the direction of measuring devices, photogrammetry/video metrology, instruments, etc., can solve the problems of not being able to obtain depth or height information, and can not meet the requirements, and achieve strong practicability and reliability, and widely Application field, the effect of huge application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
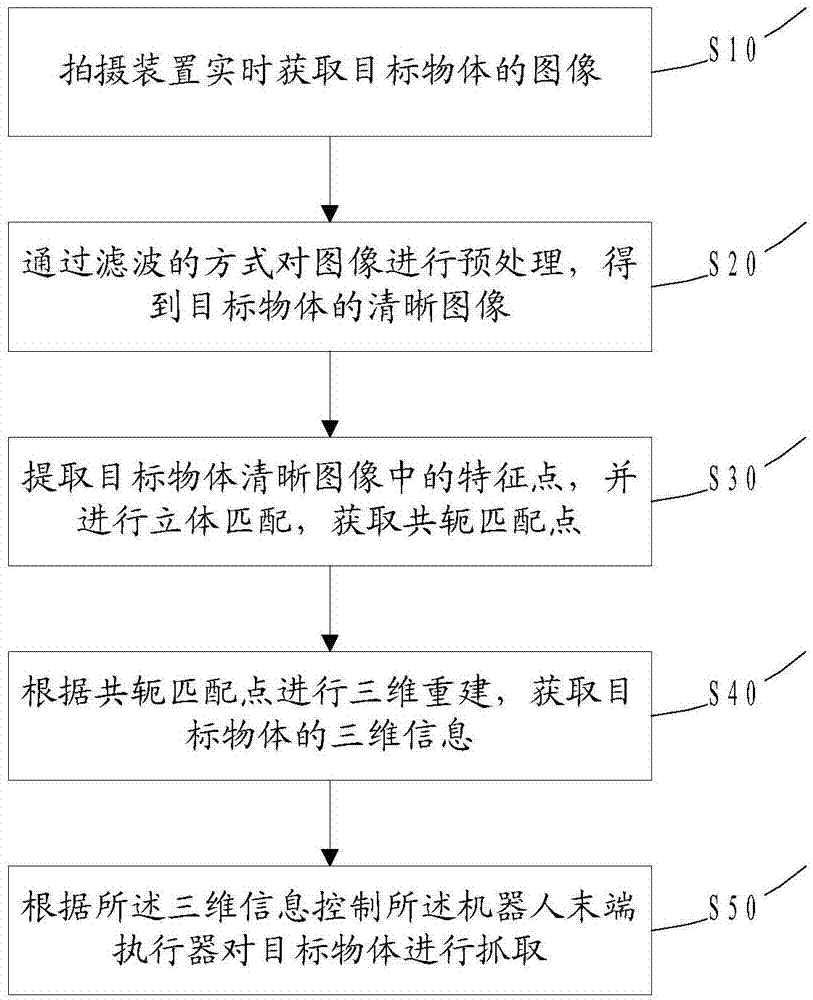
[0022] Please refer to figure 1 A method for measuring robot hand-eye stereo vision, comprising a photographing device and a robot, the method comprising the steps of:
[0023] S10: The photographing device acquires an image of the target object in real time.
[0024] The photographing device is fixed on the end effector of the robot arm and moves together with the end effector, so that the photographing device acquires images of the same target object at multiple different positions (two in this embodiment). In , two images are acquired. In this embodiment, the photographing device is a video camera.
[0025] Before the photographing device acquires an image, the photographing device must be calibrated first, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More