

Route planning method for mobile robot
A mobile robot and path planning technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problem of low versatility of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] A path planning method for a mobile robot, comprising:
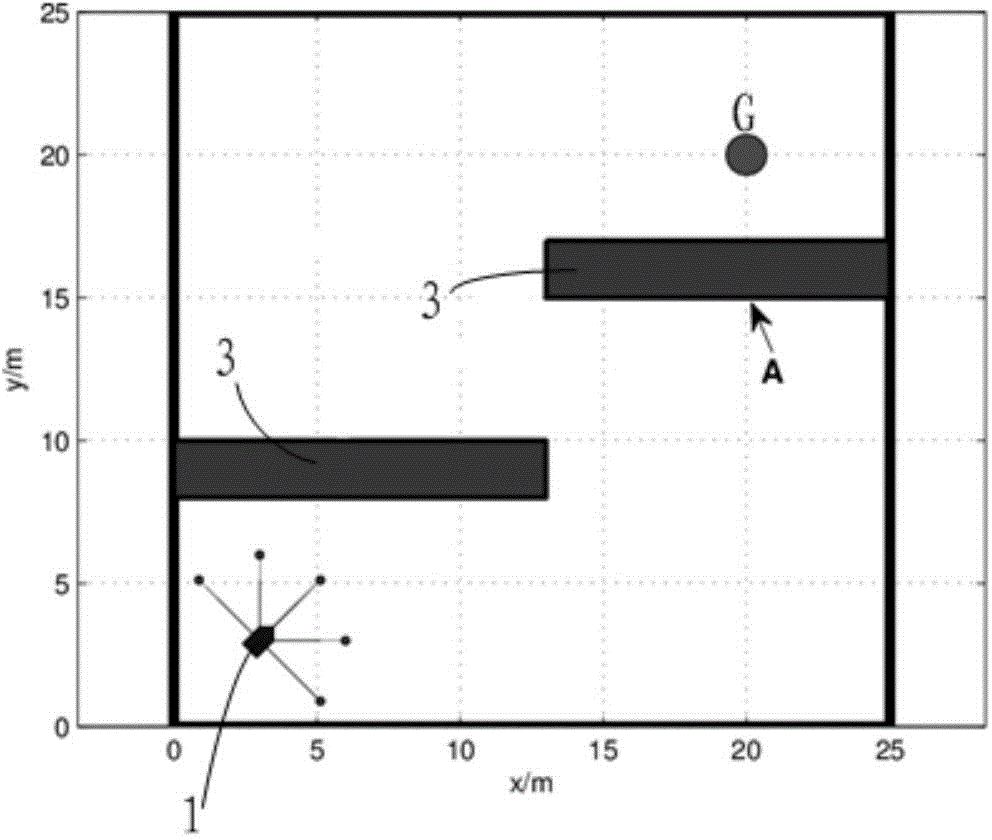
[0063] 1. The environment is assumed to be a two-dimensional plane, the mobile robot can move freely on the two-dimensional plane, and a target object is set in the environment (the coordinates are (x g ,y g )) and several obstacles and there is no intersection between the target object and the obstacle, the control goal is to determine a control strategy so that the robot finally reaches the goal and does not touch the obstacle during the movement.
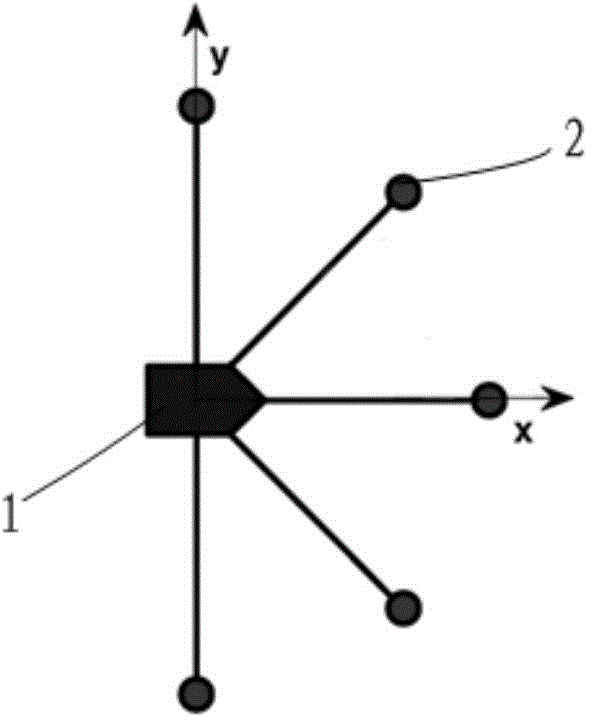
[0064] The present invention detects the distance s between the mobile robot 1 and the obstacle through a plurality of distance sensors 2 i , a number of distance sensors are evenly distributed on the circumferential front of the mobile robot. The mobile robot adopts a differential drive car model, and its kinematic equation is as follows:
[0065] x · =vco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More