

Uninhabited combat air vehicle route path determining method based on PGSO (Particle-Glowworm Swarm Optimization) algorithm
A group optimization algorithm and path determination technology, applied in the direction of calculation, calculation model, instrument, etc., can solve the problems that have not yet been found and solved, and achieve the effect of speeding up the convergence speed, reducing the cost, and improving the solution accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in further detail below in conjunction with accompanying drawing and embodiment:
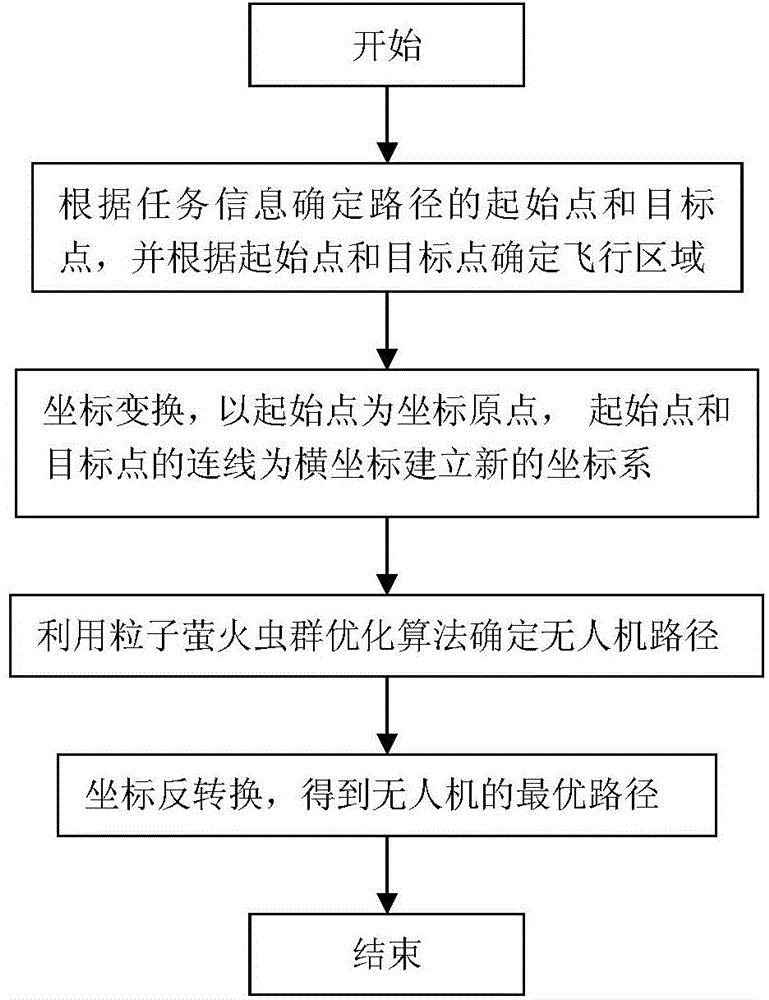
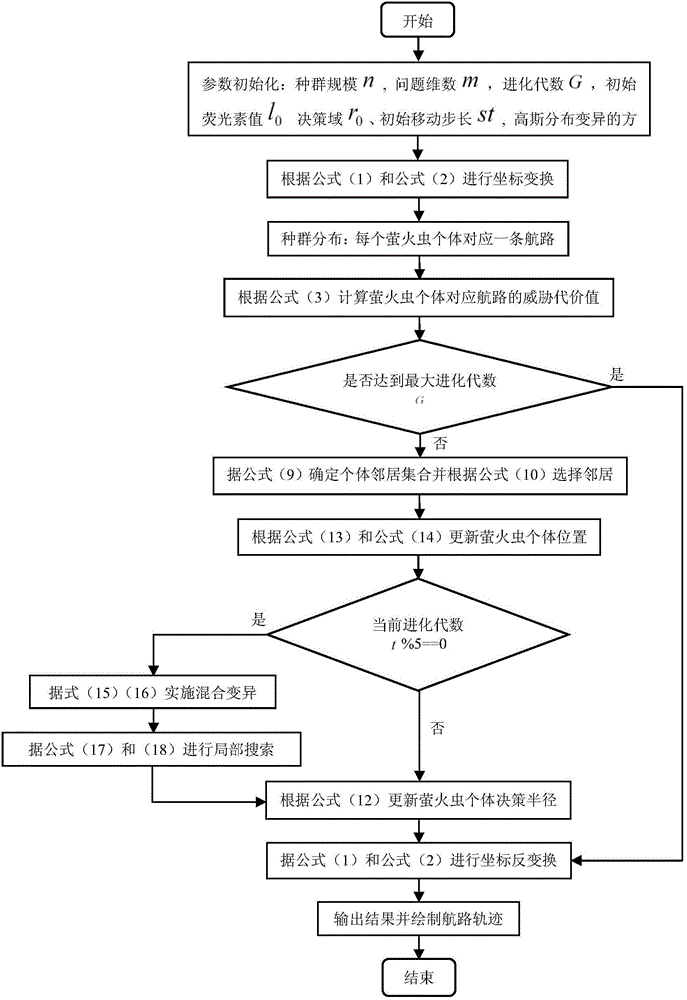
[0017] The present invention is a method for determining the optimal path of UAV routes based on particle firefly swarm optimization algorithm. The specific process is as follows: figure 1 shown, including the following steps:
[0018] Step 1: Determine the starting point and target point of the path according to the mission information, and determine the flight search area according to the starting point and target point;
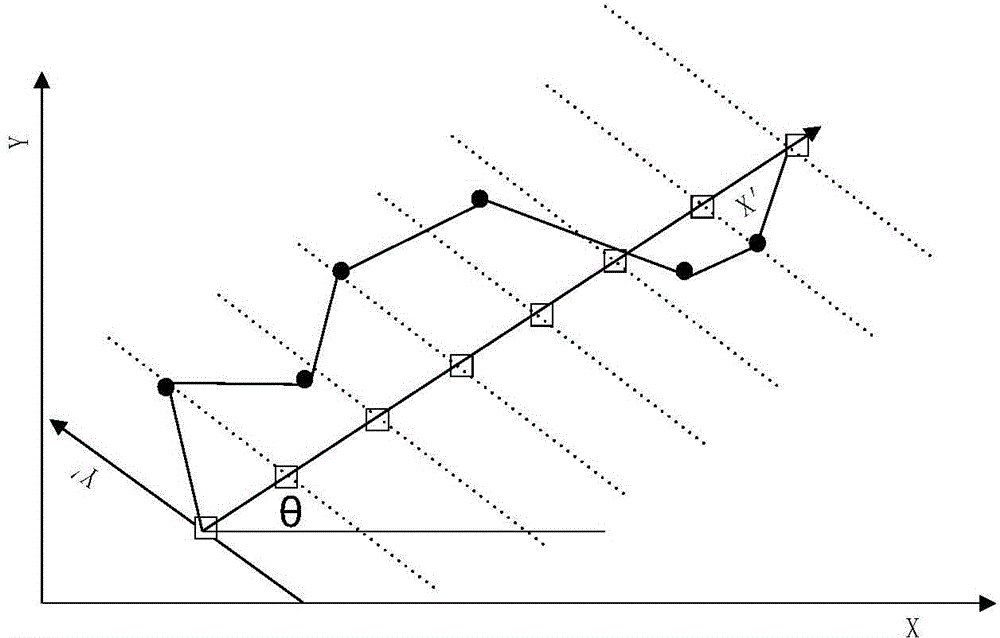
[0019] Step 2: Take the starting point Q(x 1 ,y 1 ) is the coordinate origin, the starting point Q(x 1 ,y 1 ) and target point M(x 2 ,y 2 ) is the abscissa X', through the following coordinate transformation formula
[0020] θ = arcsin y 2 - y 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More