

A non-cooperative real-time obstacle avoidance method for unmanned aerial vehicles based on instantaneous collision points
A technology of unmanned aerial vehicle and collision point, applied in the field of unmanned aerial vehicle, can solve the problem of low autonomous ability of unmanned aerial vehicle system, and achieve the effect of easy implementation, improved safety and simple principle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
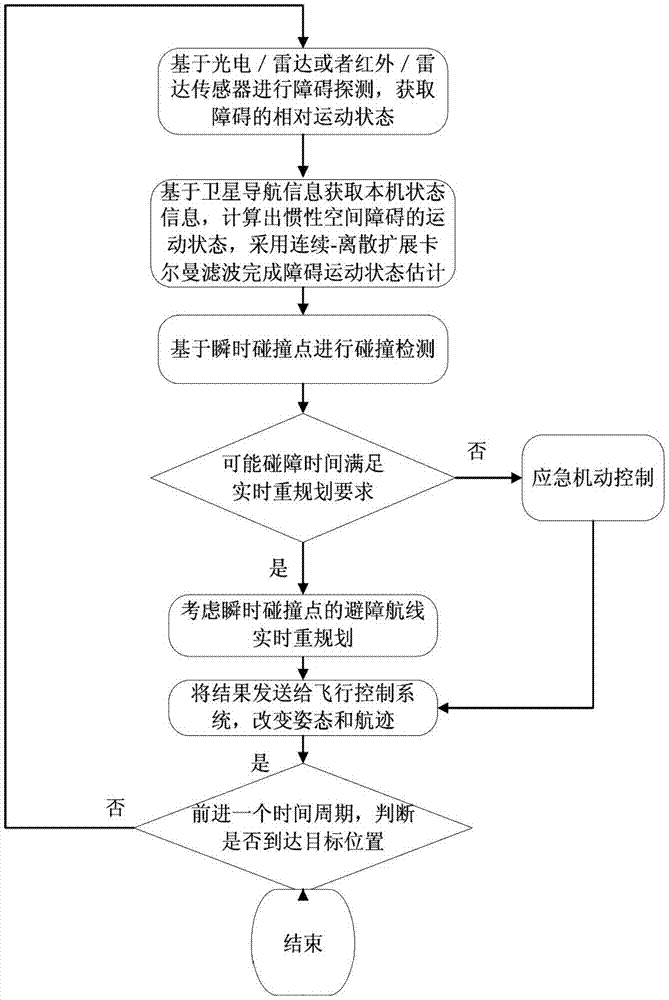
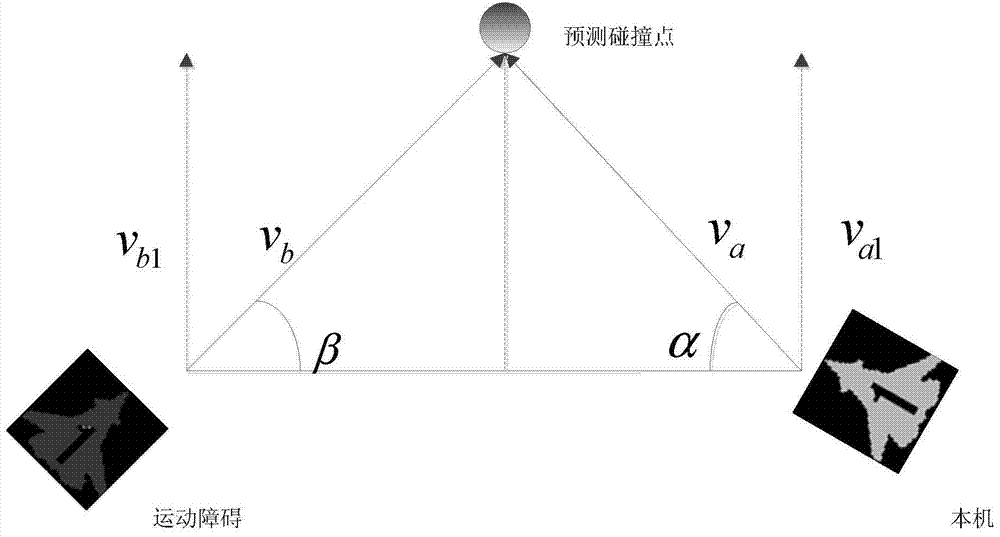
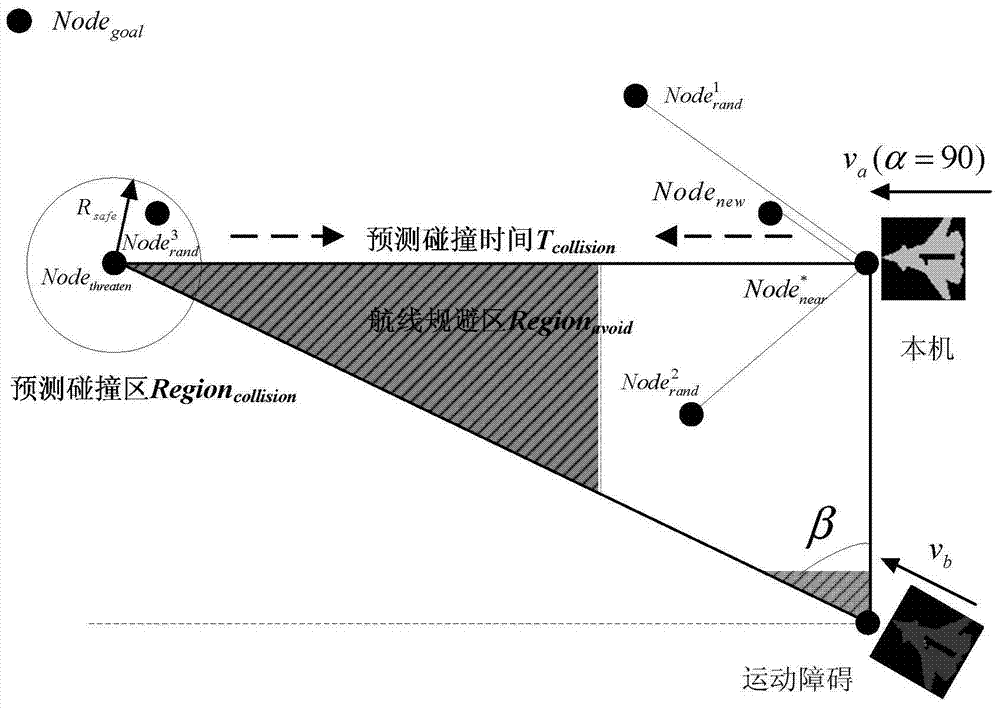
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0053] A non-cooperative real-time obstacle avoidance method for UAVs based on instantaneous collision points of the present invention is a non-cooperative real-time collision detection and obstacle avoidance route planning method for UAVs based on the idea of "instantaneous collision points" in the parallel approach method. The parallel approach method is a common guidance law in aircraft tracking. The problem of obstacle avoidance is actually similar to problems such as precise guidance. The difference is that the former must always aim at the target point, and obstacle avoidance requires avoiding pointing to the target point as much as possible. Based on this idea, it is easy to detect possible collision relationships between drones and obstacles. At the same time, the area around the instantaneous collision point and the releva...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More