

Non-overlap vision field trans-camera indoor pedestrian target tracking method and non-overlap vision field trans-camera indoor pedestrian target tracking system
A pedestrian target and target tracking technology, which is applied in the field of pedestrian target tracking and matching, and can solve problems such as complex realization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The technical solution of the present invention will be described in detail below in conjunction with the drawings and embodiments.
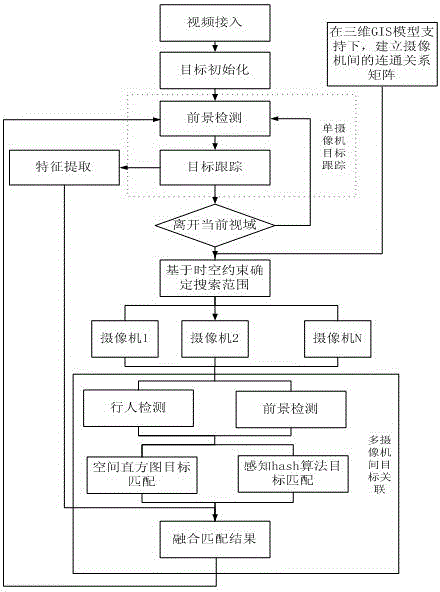
[0070] At present, with the construction of digital cities for many years, 3D GIS data has gradually become a major data source, and indoor models are also important information. GIS is a geographic information system. The invention proposes to use the indoor three-dimensional GIS to provide data support for estimating the topological relationship between cameras, and it is a robust method to estimate the topological relationship between cameras based on the three-dimensional GIS. During specific implementation, the technical solution of the present invention can adopt computer technology to realize the automatic operation process. see figure 1 , the flow process of the method provided by the embodiment includes the following steps:
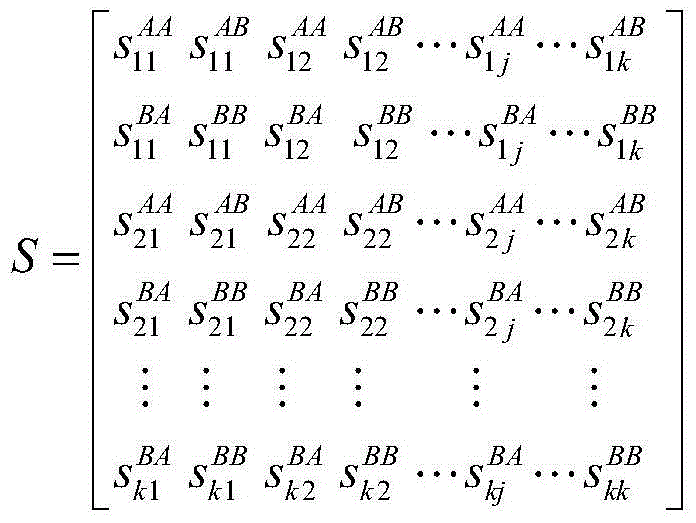
[0071] Step 1: With the auxiliary support of the 3D GIS model, establish the connectivity matrix betwee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More