

Power line inspection robot and obstacle surmounting method thereof
A technology for inspection robots and power lines, which is applied to manipulators, overhead line/cable equipment, manufacturing tools, etc., can solve the problems of limited obstacle crossing function, cumbersome obstacle crossing steps, and poor obstacle crossing effect, so as to achieve simple actions and avoid serious problems. Vibration problem, the effect of reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045]The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
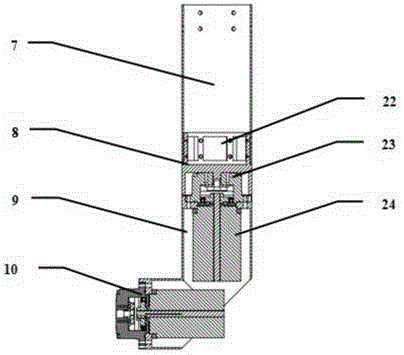
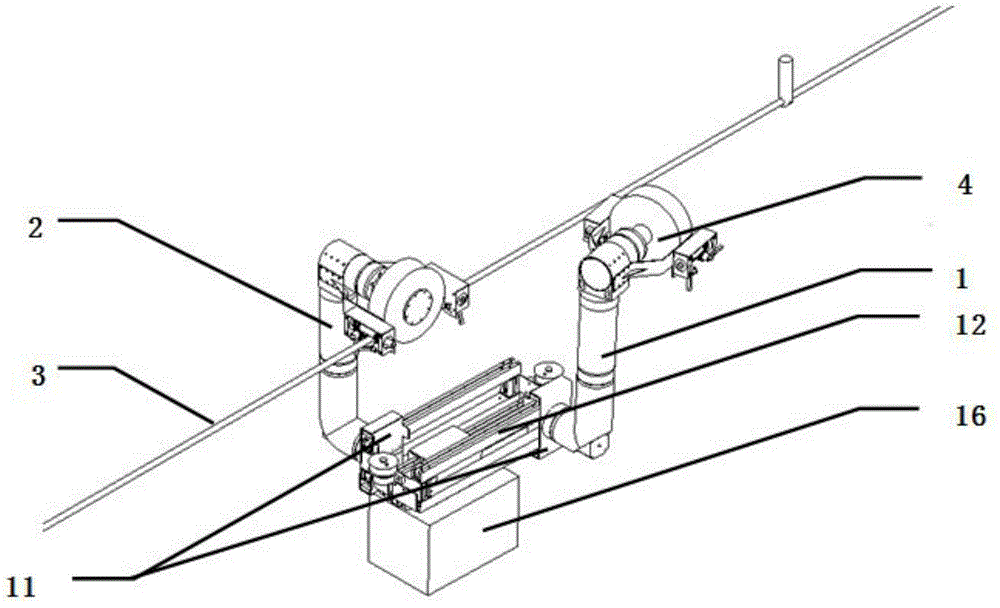
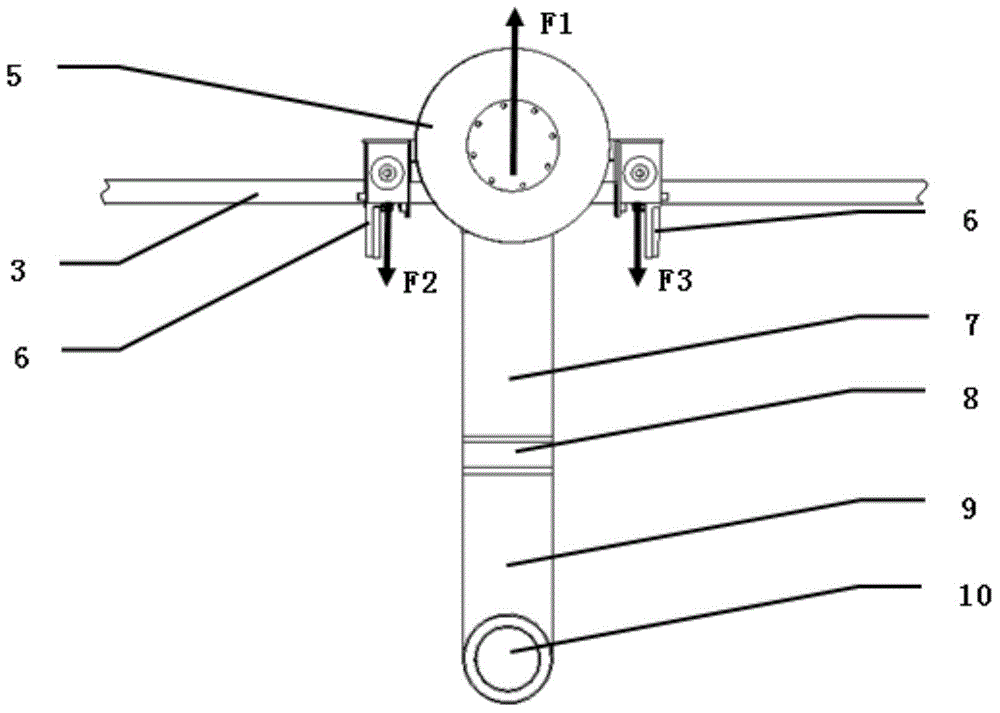
[0046] This embodiment provides an obstacle-surmounting method for a power line inspection robot, which can be implemented by a double-arm suspension type power line inspection robot with an adjustable center of gravity, such as figure 1 As shown, the power line inspection robot applied in this method includes a first cantilever 1 and a second cantilever 2, and the double cantilever (the first cantilever 1 and the second cantilever 2) is suspended on the power line 3 through the end effector 4 above...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More