

Adaptive flying adsorption wall-climbing robot
A wall-climbing robot and adsorption technology, applied in aircraft, motor vehicles, rotorcraft, etc., can solve the problems of slow moving speed, high power consumption, difficulty in crossing obstacles, etc., and achieve high mobility, low power consumption, and good use. Foreground effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The specific implementation manner and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings.
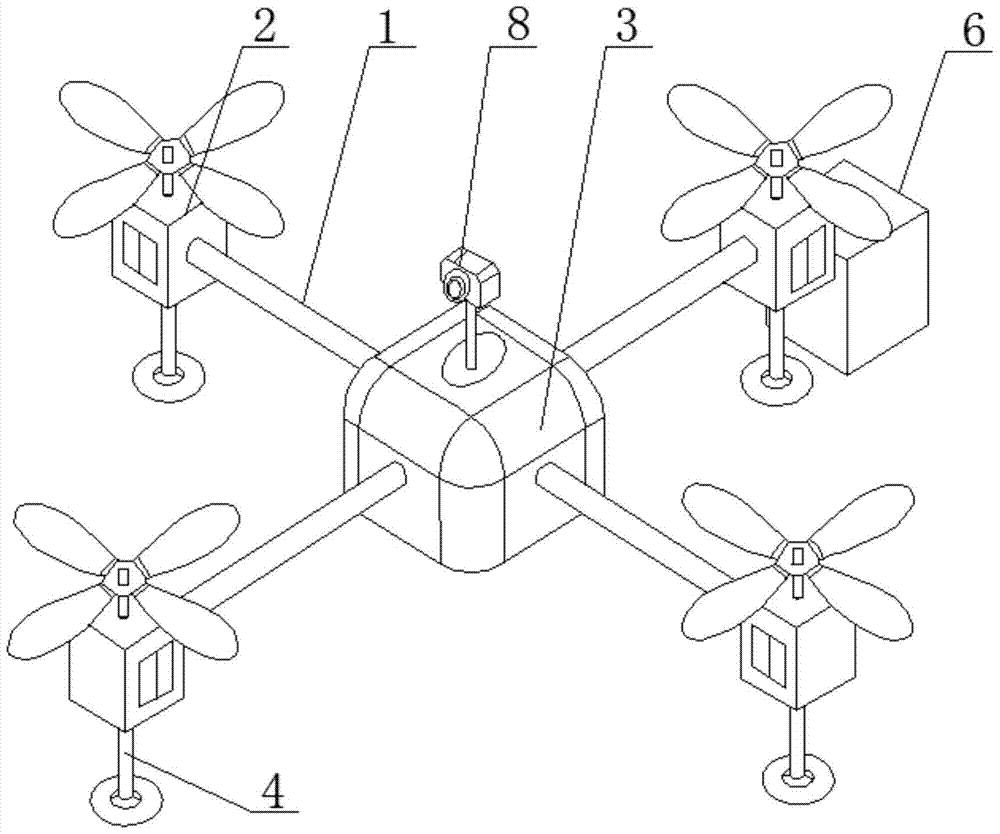
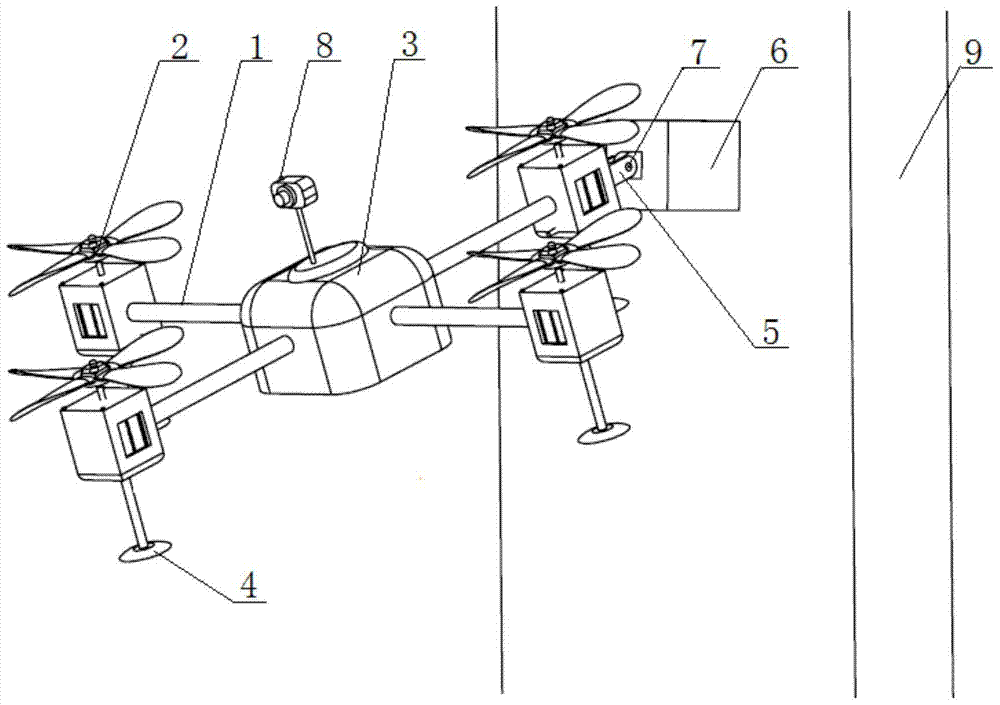
[0022] Such as Figure 1-Figure 2 As shown, an adaptive flying adsorption wall-climbing robot includes a mounting bracket 1 with a cross-shaped connecting arm, a plurality of rotor mechanisms 2 for providing flight power, and a wireless control module for realizing adaptive control of working conditions 3. The wireless control module 3 is fixed at the center of the cross-shaped connecting arm, a camera 8 is arranged above the wireless control module 3, and a plurality of the rotor mechanisms 2 are respectively installed at the end of each connecting arm, Below each of the rotor mechanisms 2 is provided with a first adsorption mechanism 4, and the orientation of the adsorption surface of the first adsorption mechanism 4 is opposite to the installation direction of the rotor mechanisms 2, and close to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More