

Underwater electromechanical wrist turning and clamping drive structure
A driving structure and mechanical technology, applied in the direction of manipulator, program-controlled manipulator, mechanical equipment, etc., to achieve the effect of compact structure, stable transmission and large clamping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in further detail below in conjunction with the accompanying drawings.
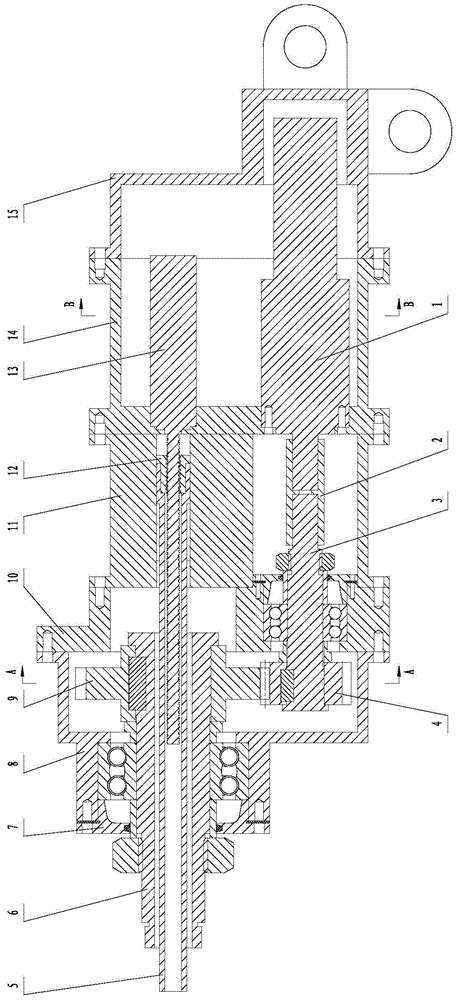
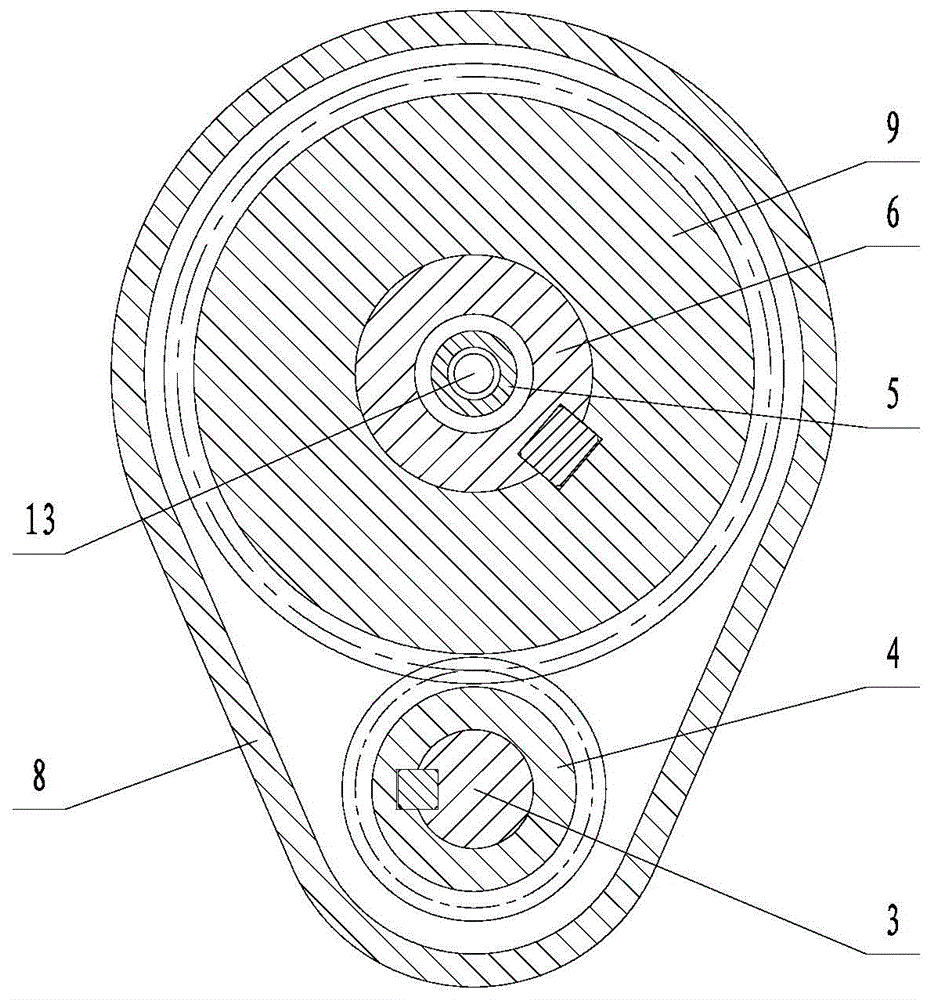
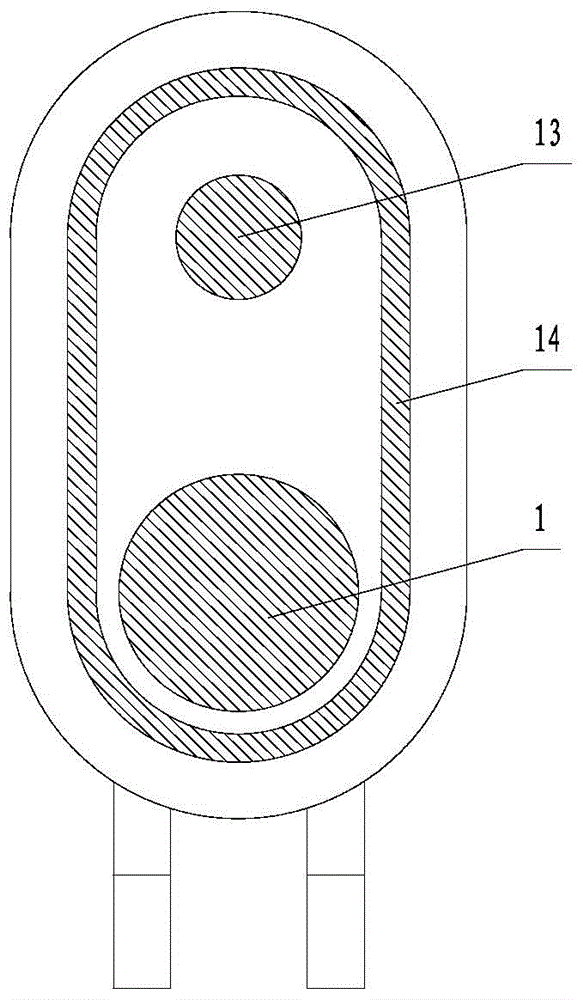
[0018] like figure 1 , Figure 2A , Figure 2B and image 3 As shown, the present invention includes a wrist-rotating drive module for realizing the wrist-rotating function of an underwater electric manipulator, a clamp driving module and a joint housing for realizing the clamp function of an underwater electric manipulator, and the wrist-rotating driving module and the clamp driving module are respectively housed in inside the joint housing. The joint housing includes a bearing cover 7 , a joint housing segment A 8 , a joint housing segment B 10 , a joint housing C segment 11 , a joint housing D segment 14 , and a joint housing rear end cover 15 which are sequentially fixed.
[0019] The wrist drive module includes a wrist motor and a reduction box assembly 1, a first shaft 3, a transmission device and a second shaft 6, wherein the transmission device in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More