

Global detection method of unstructured outdoor terrains
A detection method and unstructured technology, applied in the field of robotics, can solve problems such as difficult to achieve visual navigation of mobile robots, and achieve the effect of realizing global detection, improving stability and intelligence, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The method of the present invention is further described below in conjunction with the accompanying drawings. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following Example.
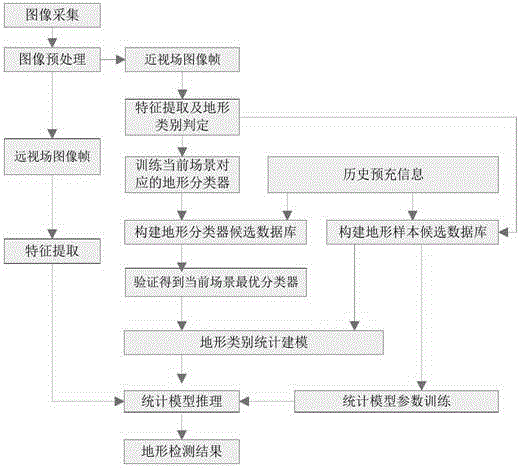
[0035] Such as figure 1 As shown, this embodiment includes: image acquisition, image preprocessing, scene image segmentation, appearance feature extraction, terrain category determination, terrain classifier candidate database construction, current scene optimal classifier verification, terrain category statistical modeling, statistical model The ten steps of parameter training and statistical model inference finally obtain the terrain detection results.
[0036] The following is a detailed description:
[0037] The first step is to collect a frame of image to memory.
[0038] The second s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More