

Method for static imbalance test for inertial platform framework
A static unbalance and inertial platform technology, applied in the field of inertial navigation, can solve the problems that the test repeatability and reproducibility are easily affected by human operation, the static unbalance test method cannot meet the requirements, and the test resolution and accuracy cannot be required. , to achieve the effect of eliminating the influence factors of human operation, good repeatability and reproducibility, and accurate testing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
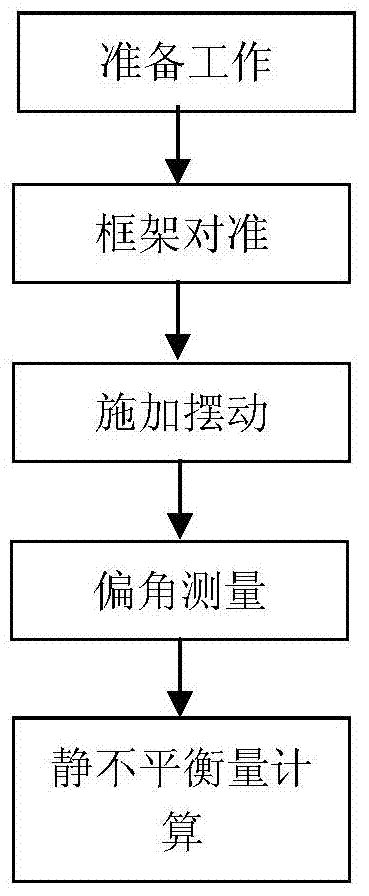
[0034] see Figure 4 , which is a schematic diagram of using the present invention to test the static unbalance of a certain type of inertial platform frame. The specific test process is as follows:
[0035] Step 1, preparation work: build a signal input system 5 and a data acquisition and processing system 6 on the frame to be tested 1;
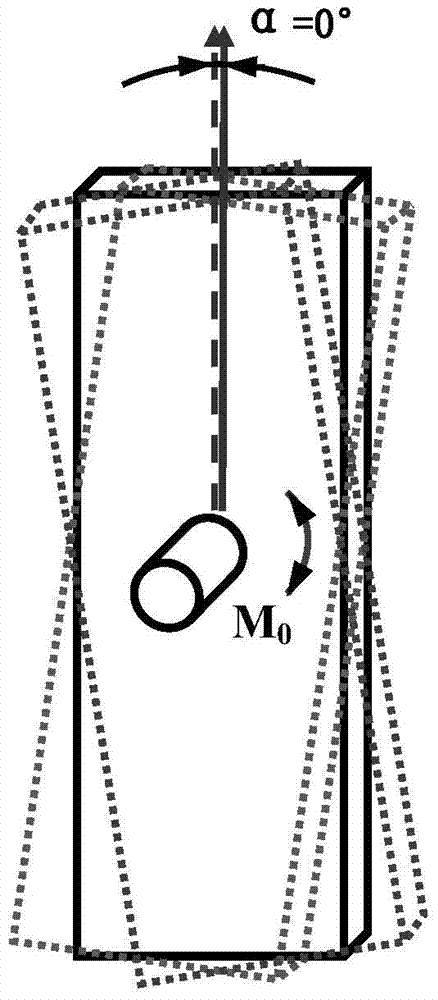
[0036] Step 2, frame alignment: straighten the frame 1 to be tested to the mechanical zero position;
[0037] Step 3, applying swing: the signal input system 5 applies swing to the frame 1 through the motor 3 as a driving mechanism, and controls the swing frequency to 1.5-2 Hz;
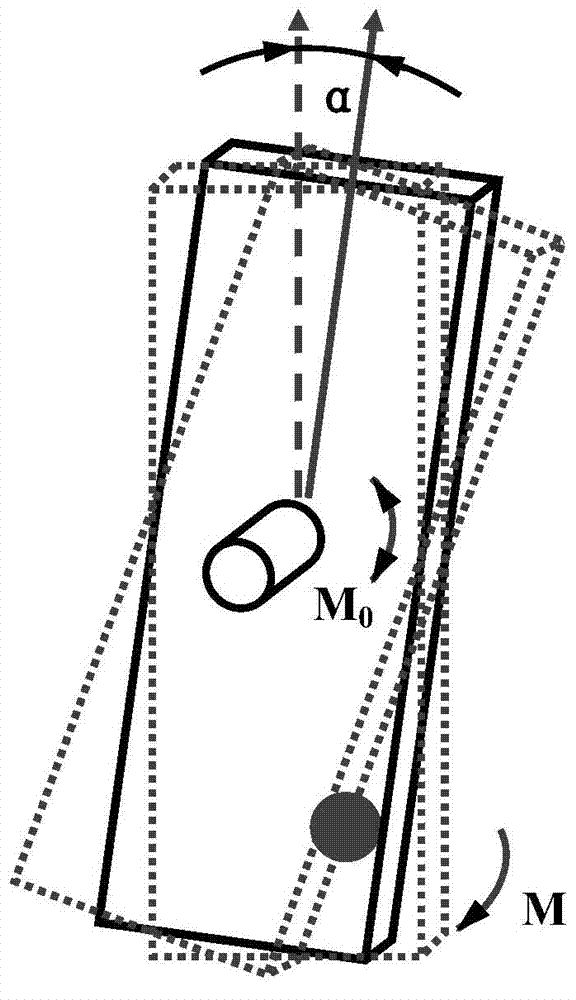
[0038] Step 4, deflection angle measurement: the data of the angle sensor 4 is collected by the data acquisition and processing system 6, and the deflection angle α=11.5° of the frame 1 relative to the mechanical zero position is calculated after the data is processed by signal filtering.
[0039] Step five, static unbalance calculation: based on Calculate the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More