

Multi-rotor-wing submersible unmanned aerial vehicle and control method thereof
An unmanned aerial vehicle, multi-rotor technology, applied in aircraft, rotorcraft, underwater ships, etc., can solve the problems of drone damage, drone without waterproof protection or underwater sneak function, etc., to avoid collision and lift the aircraft. Power, damage-solving effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
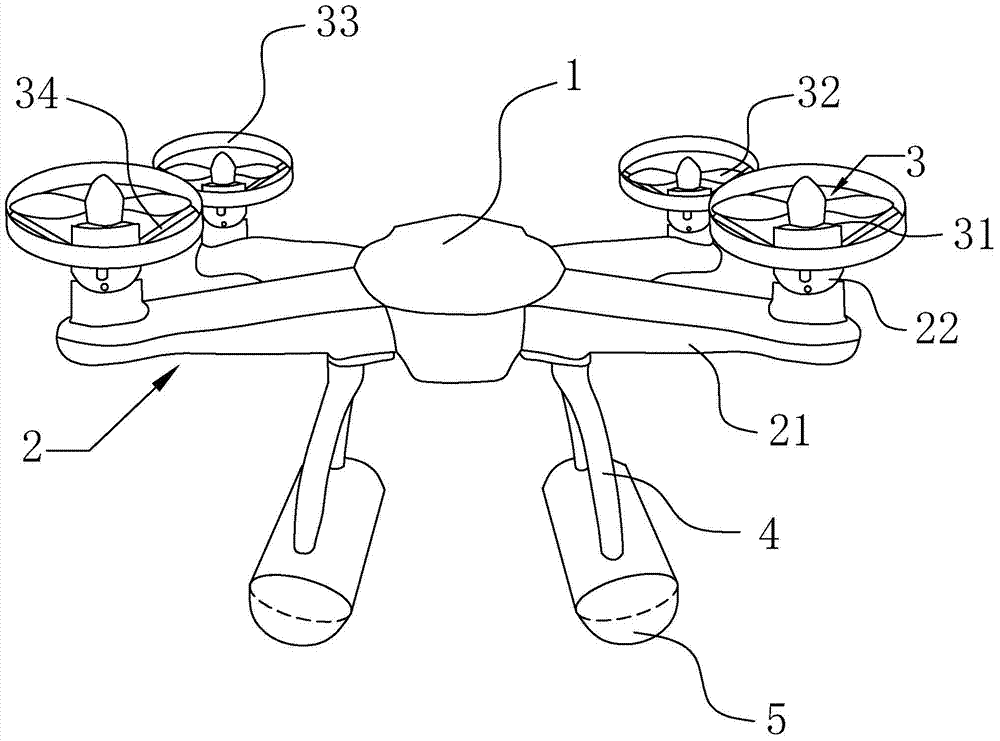
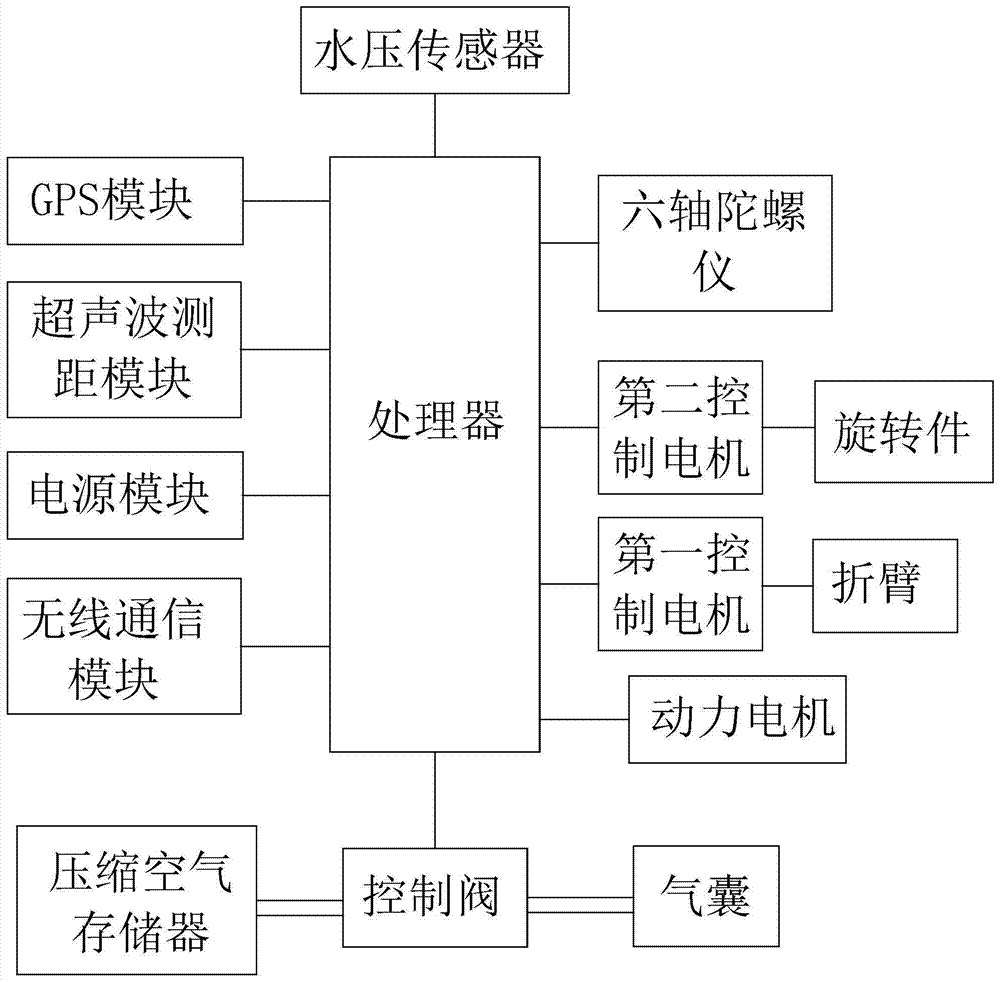
[0031] refer to Figure 1-Figure 2 , a multi-rotor submersible unmanned aerial vehicle of the present invention includes a body 1 and a plurality of rotor arms 2 arranged symmetrically on the body 1, each of the rotor arms 2 is provided with a rotor assembly 3 at an end far away from the body 1, The rotor assembly 3 includes a power motor 31 installed on the rotor arm 2 and a propeller 32 connected to the output shaft of the power motor 31. A pair of landing gear 4 is symmetrically installed on the bottom of the body 1, and the landing gear 4 is covered and installed There is an airbag 5, and a processor, a power module, a wireless communication module, an ultrasonic ranging module, a compressed air storage device and a control valve are installed in the body 1, and the processor is connected with the power module, the wireless communication module, and the ultrasonic ranging module respectively. , the control valve is connected to the power motor 31 on each rotor arm 2, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More