

Automatic tracking and positioning method for surgical instrument in large visual field
A surgical instrument and automatic tracking technology, applied in the field of surgical navigation, can solve the problems of inability to locate surgical instruments in a large range, and the effective field of view of the binocular vision system is small, so as to achieve automatic tracking and positioning, and solve the effect of small effective field of view.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
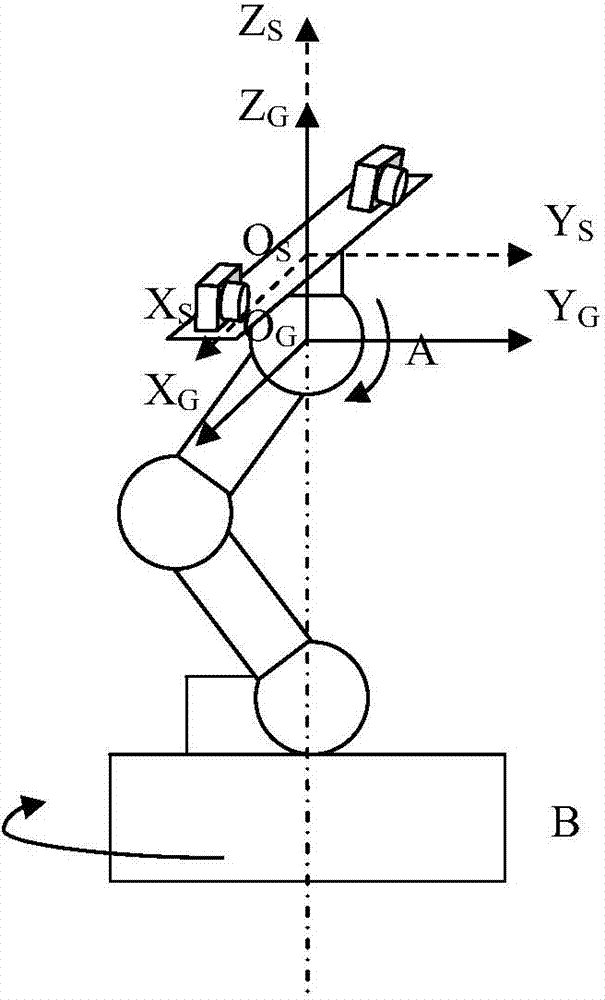
[0022] Such as figure 1 As shown, the automatic tracking and positioning method of the surgical instrument under the large field of view of the present invention is realized through the following steps:
[0023] (1) Fix the binocular vision system to the moving end of the upper part of the robotic arm. Initialize the position of the mechanical arm. In order to simplify the subsequent coordinate calculations, the center of the upper shaft A of the robotic arm is located directly above the center of the lower shaft B. The binocular vision system consists of two near-infrared cameras and brackets that fix their positions. The optical axis of the camera is horizontal to the ground, and the center of the line connecting the two cameras is on the same vertical line as the center of the rotation axis A and B of the mechanical arm. figure 1 shown. Take the center point of the rotation axis A as the origin, take the direction connecting the two cameras as the X axis, and take the ver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More