

Optimal attitude matching-based moving base transfer alignment time delay compensation method
An optimal attitude matching and compensation method technology, applied in the field of inertial navigation, can solve the problem of not considering the large installation angle, and achieve the effect of solving the time delay problem, improving the transmission alignment accuracy, and avoiding trouble.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0091] In order to illustrate the method of the present invention and fully demonstrate the reliability and accuracy of the method, the simulation test is as follows:
[0092] 1) Simulation initial conditions and parameter settings
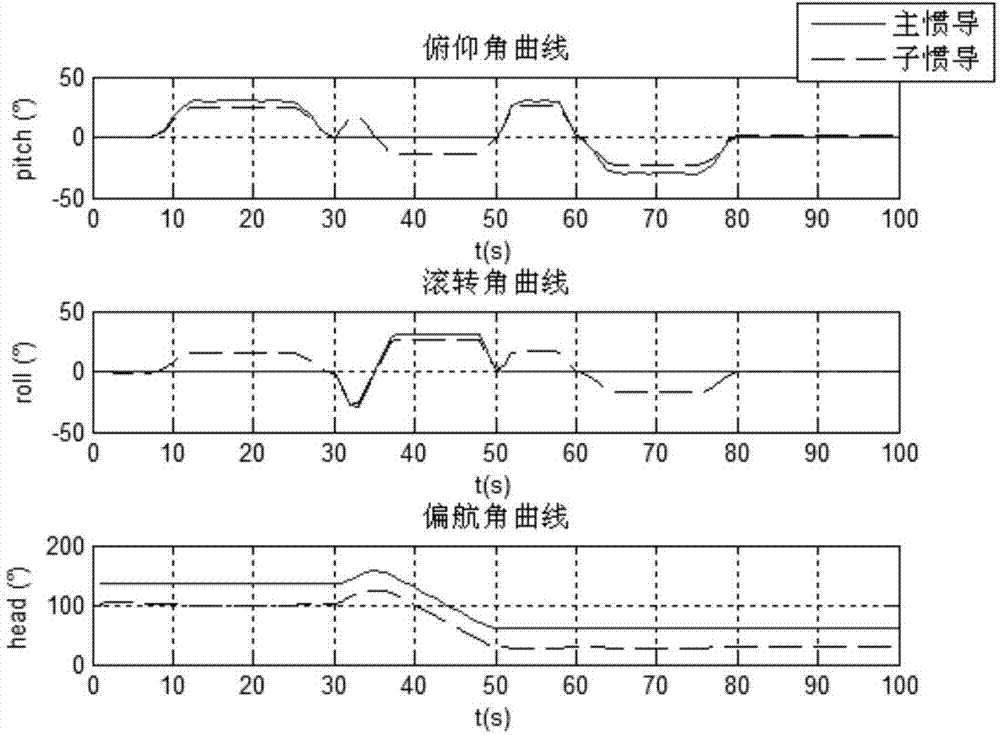
[0093] (11) The east, north, and sky speeds of the carrier are -50m / s, -50m / s, and 0m / s respectively; the initial position of the carrier: the latitude is 32.03°, the longitude is 118.46°, and the height is 400m; the initial attitude of the carrier is: pitch The angle is 0°, the roll angle is 0°, and the yaw angle is 135°.
[0094] (12) The sub-inertial navigation accelerometer constant value bias is set to 5 mg; the sub-inertial navigation gyro constant value drift is set to 10 (deg / h).
[0095] (13) Kalman filter initial parameter X 0 , R 0 , Q 0 ,P 0 The settings are as follows:
[0096] x 0 =0
[0097] P 0 =diag{(1°) 2 ,(1°) 2 ,(1°) 2 ,(0.5m / s) 2 ,(0.5m / s) 2 ,(0.5m / s) 2 ,
[0098] (10° / h) 2 ,(10° / h) 2 ,(10° / h) 2 ,(5mg) 2 ,(...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More