

Robotic devices for assisting and rehabilitating the lower extremities
An exoskeleton robot, lower limb technology, which is applied in the direction of equipment to help people move, passive exercise equipment, physical therapy, etc., can solve the problem of no auxiliary lower limbs, etc., to reduce swing quality, improve sports compatibility, and improve system ergonomics sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Hereinafter, the present invention will be described in detail with reference to the above-mentioned drawings.
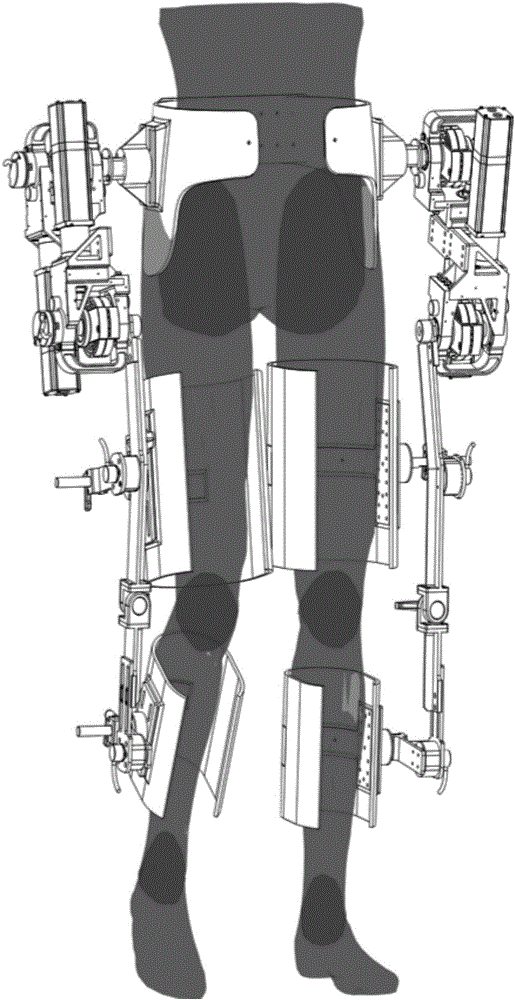
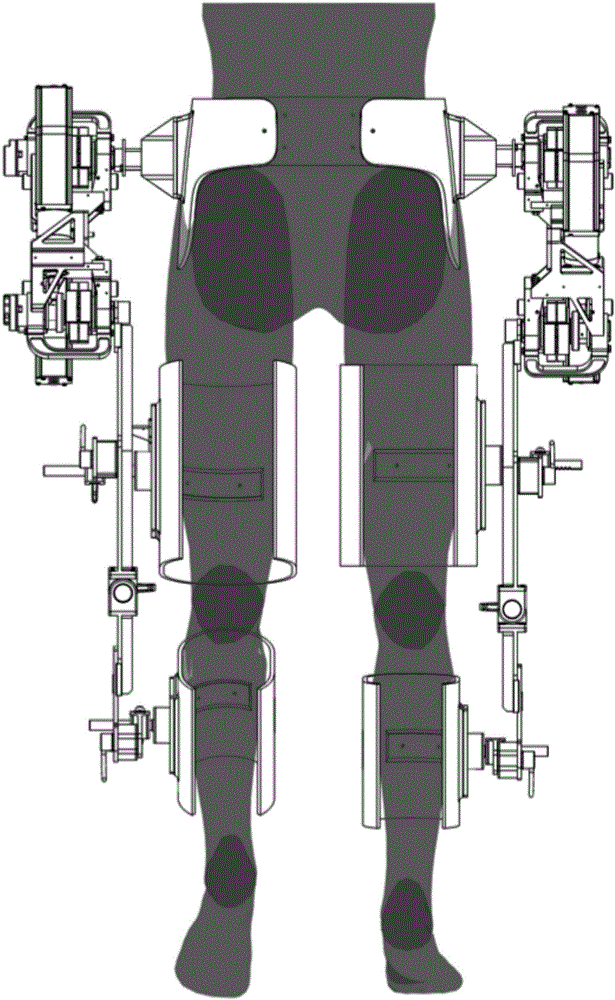
[0051] In particular, Figure 1 shows a robotic device 1 of the invention.
[0052] Device 1 is a wearable robot for assisted walking and motor rehabilitation, which is capable of assisting hip and knee flexion / extension movements in the sagittal plane. In addition, the device can also be used as an anthropomorphizer and a device for monitoring movement.
[0053] The robot is equipped with a two-degree-of-freedom (DoF) planar motion structure. The structure consists of a kinematic chain connected in parallel with the lower limbs. In order to ensure optimum assistance, human-robot systems must adopt different configurations compatible with the characteristic range of walking motions.
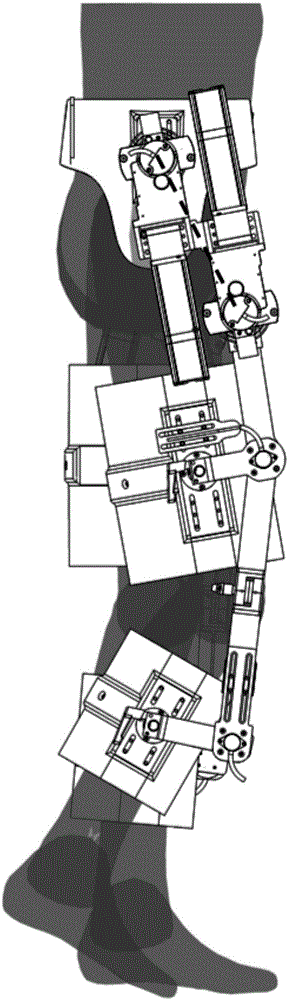
[0054] The device includes a pelvic sleeve, where a first pelvic engagement corresponding to the first driver and a second intermediate engagement corresponding to the second ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More