

Coordination control method for multi-unmanned aerial vehicle team based on predation escape pigeon optimization
An unmanned aerial vehicle, coordinated control technology, applied in the field of intelligent cybernetics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
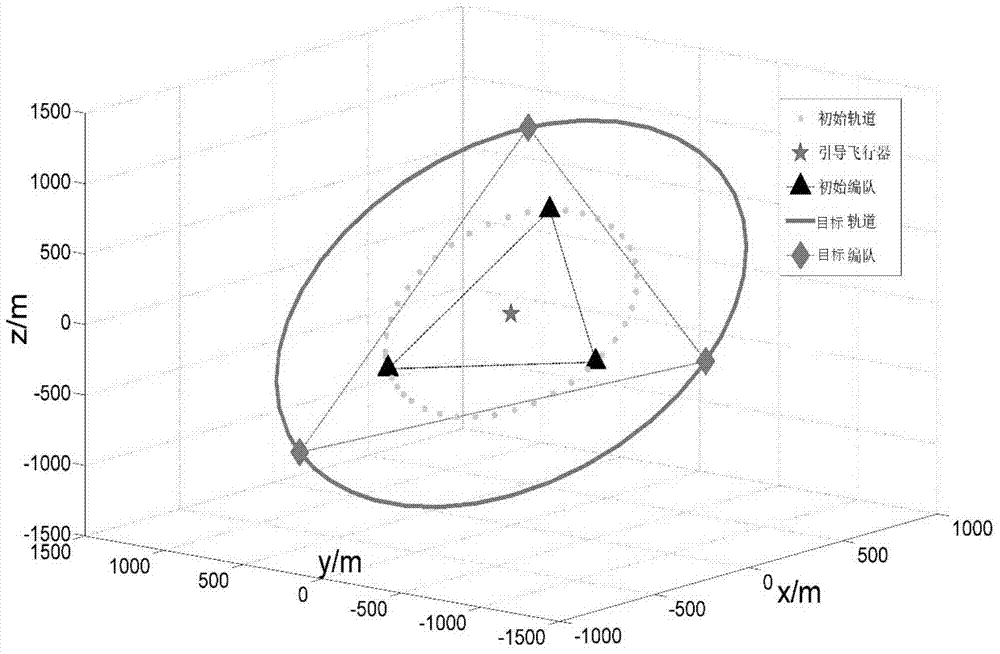
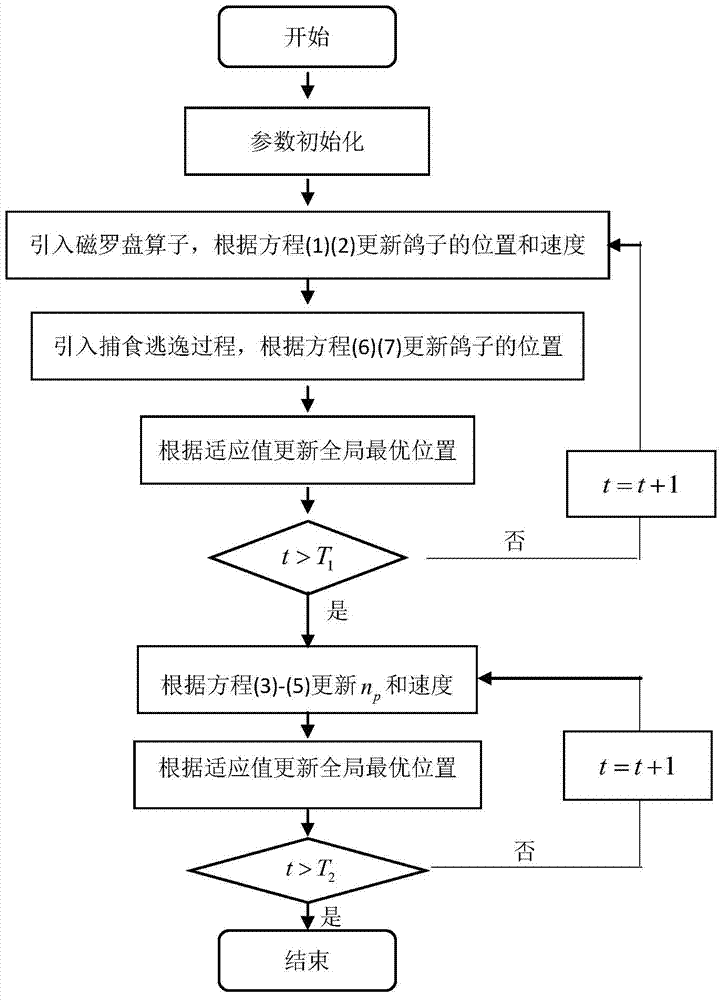
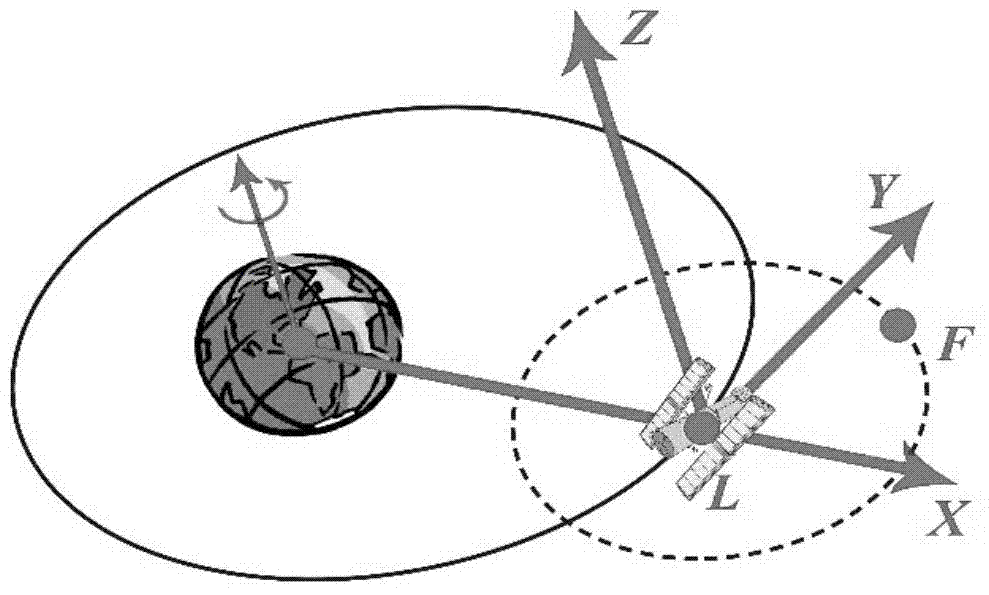
[0069] See figure 1 — Figure 4 , the present invention is based on a multi-unmanned aerial vehicle formation coordination control method based on the optimization of predation and escape pigeon groups. The specific steps of the method are as follows:
[0070] Step 1: Establish the corresponding fitness value calculation function f() according to the given constraints, and set the corresponding parameters. The parameter settings include: the size of the population n 1 =30 Optimization dimension d=6, map compass factor R=0.1, maximum iteration times T of the two operators 1 =100,T 2 =20, the predation control parameter r=0.001. In this manual, the UAV formation coordination is taken as an example, and the initial parameters in this example are shown in Table 1.
[0071] Step 2: Randomly initialize the initial position and speed of each hawk and dove, and calculate the fitness value of each hawk and dove according to the mathematical model of the actual problem established...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More