

Reactive navigation control method for underground mining vehicle
A control method and reactive technology, applied in the field of navigation, can solve problems such as unusable, accumulative, dead reckoning information errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the accompanying drawings and specific examples.
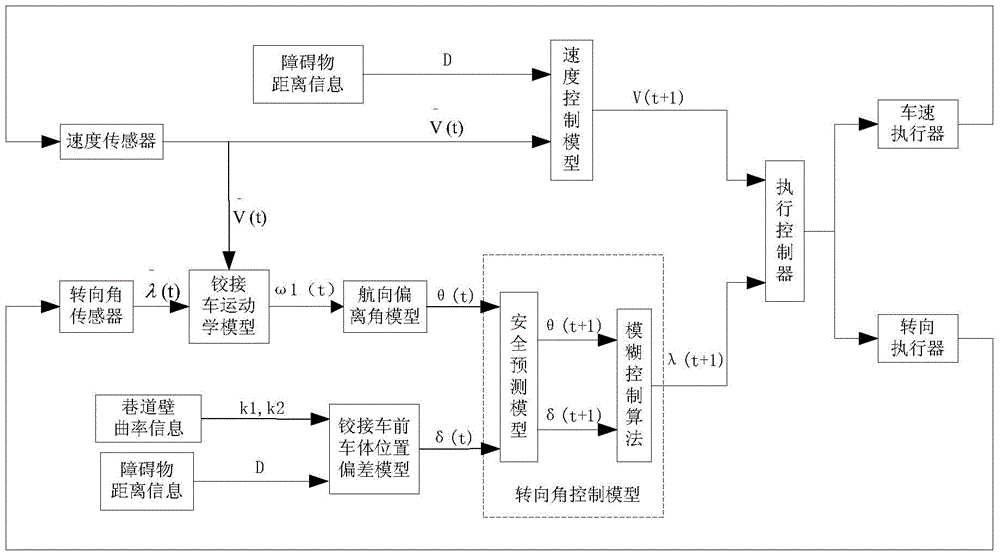
[0084] The embodiment of the present invention proposes a reactive navigation control method for underground mining vehicles, the flow of which is as follows Figure 17 shown, including:
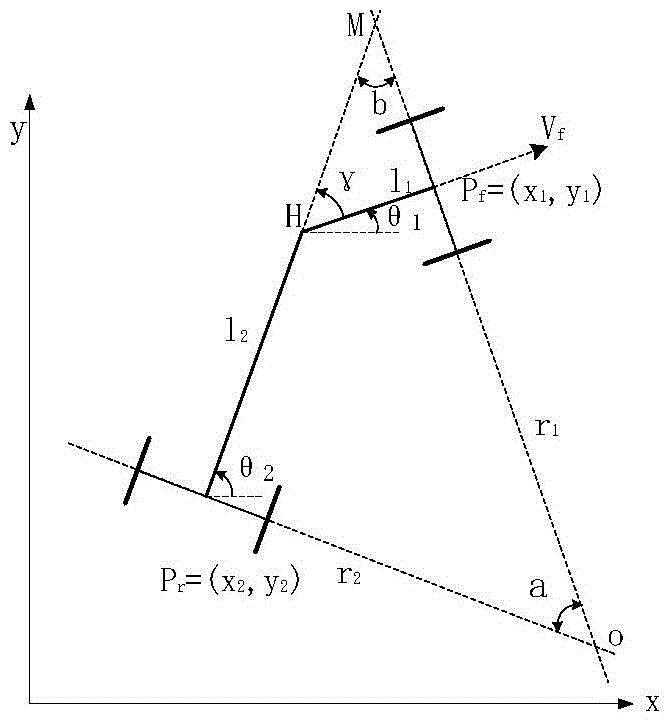
[0085] According to the current vehicle hinge point, front axle midpoint, front axle speed, front axle yaw rate, front axle turning radius, rear axle midpoint, rear axle speed, rear axle yaw rate, rear axle turning radius, establish the following The estimated value model of the front axle pose state vector at one moment;
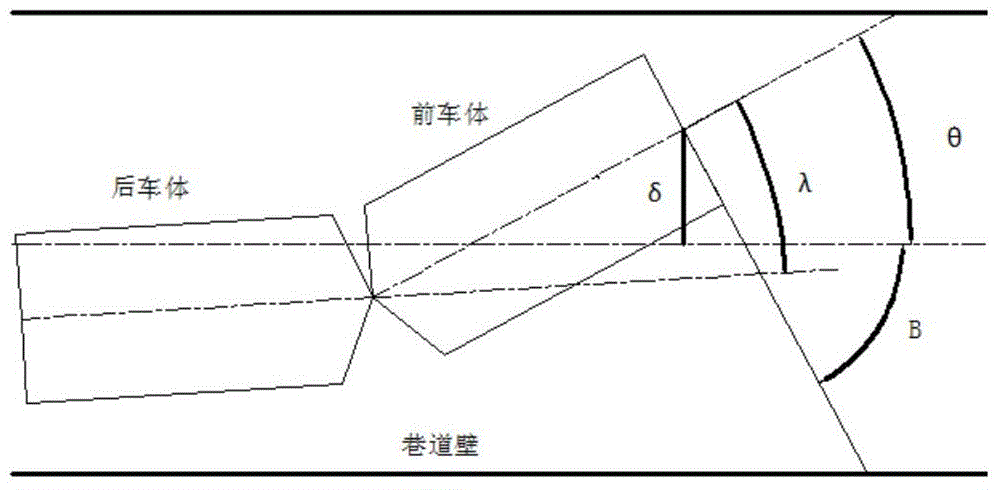
[0086] Establish a course deviation angle model;
[0087] Establish the deviation model of the center position of the front axle of the articulated vehicle;
[0088] Establish a steering angle control model, wherein the steering angle c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More