

Depth acquisition method for complex scene
A technology for complex scenes and acquisition methods, which is applied to complex scenes with large depth differences between multiple objects to be measured. In the field of depth acquisition of complex scenes, it can solve the problems of inaccurate depth data in complex scenes, and achieve good robustness, The effect of large speckle size and improved robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
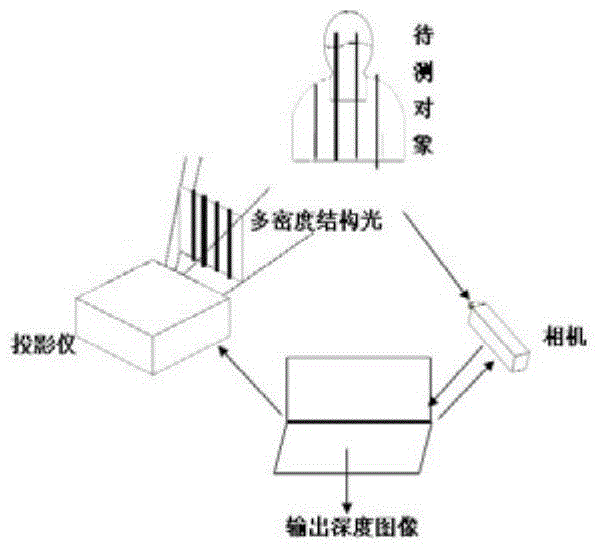
[0015] The depth acquisition method of this complex scene mainly includes the following steps:
[0016] (1) The optimal speckle density pattern is related to the actual depth of the target to be measured, and formula (3) is used to design structured light pattern patterns of different densities corresponding to different actual depths: P 0 ,P 1 ,...,P M ;
[0017] k(r)=round{[sin(2πr / T)+1]*α+1} (3)
[0018] Where r represents the row order, k(r) represents the password of each row, α is a scalar factor that controls k(r) to be an integer in the range of 1, 2...N, and T is the number of rows.
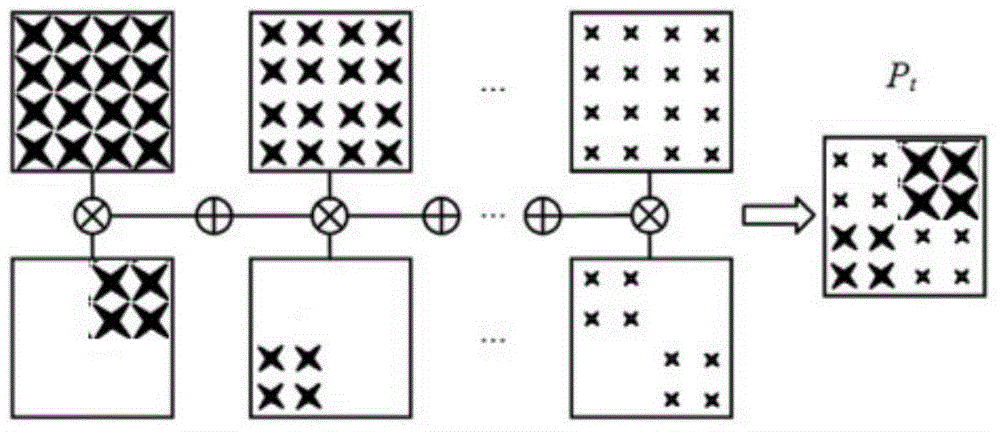
[0019] (2) Project M laser speckle patterns P with different densities generated in step (1) 0 ,P 1 ,...,P M , correspondingly get M modulated images I of the object to be measured 0 , I 1 ,...,I M , using formula (1) to generate P t :
[0020] (3) According to the speckle structured light corresponding to the local depth distance corresponding to the optimal projection densit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More