

Six-degree-of-freedom handling mechanical arm
A technology of manipulators and degrees of freedom, applied in the field of robots, can solve problems such as inflexible movements, small working space, and bulky mechanisms, and achieve the effects of flexible trajectory output, large working space, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, but it should be understood that the protection scope of the present invention is not limited by the specific embodiments.
[0025] Unless expressly stated otherwise, throughout the specification and claims, the term "comprise" or variations thereof such as "includes" or "includes" and the like will be understood to include the stated elements or constituents, and not Other elements or other components are not excluded.
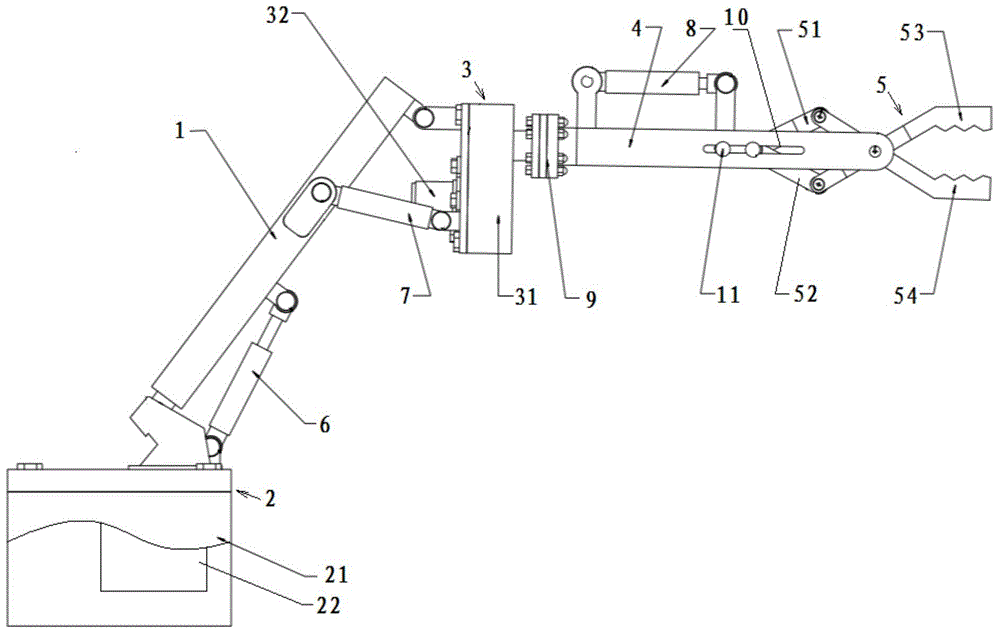
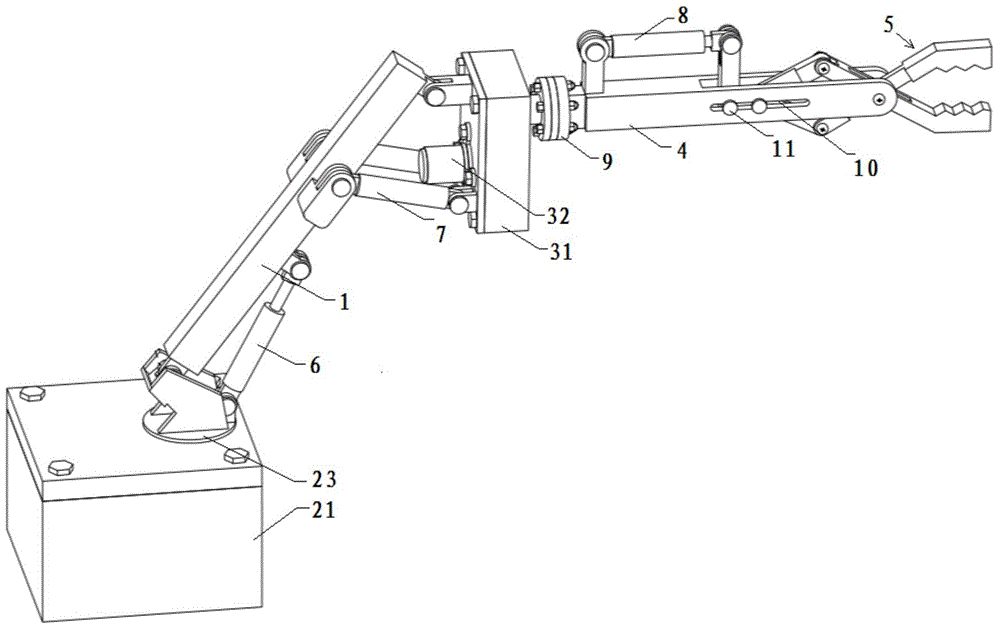
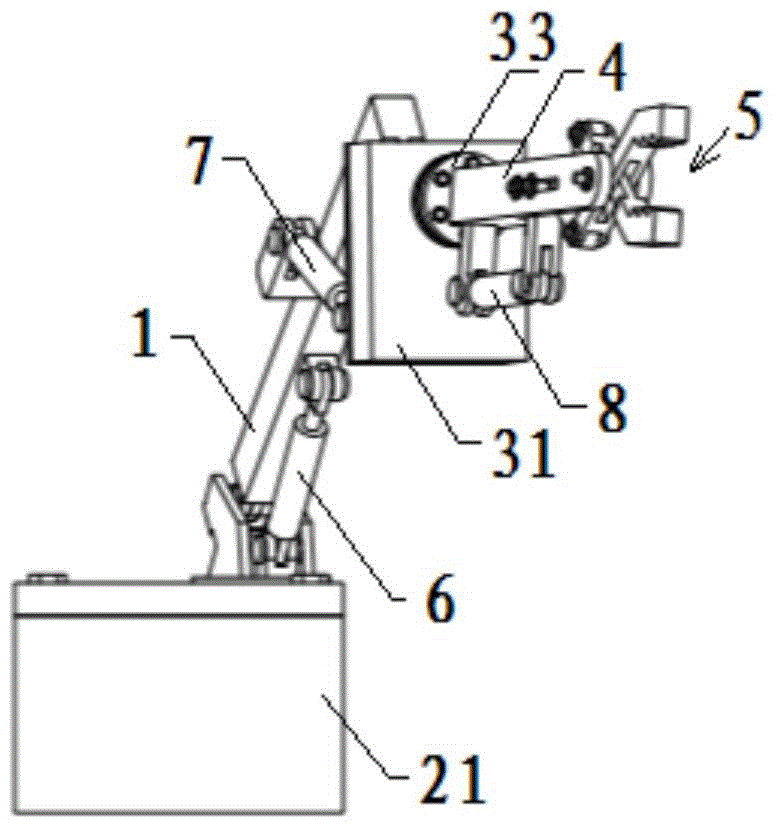
[0026] Such as Figure 1 to Figure 3 As shown, a six-degree-of-freedom handling manipulator according to a specific embodiment of the present invention includes: a horizontal rotating platform 2, a first mechanical arm 1, a vertical rotating platform 3, a second mechanical arm 4, and a third driving device 8; the first One end of the mechanical arm 1 is hinged on the horizontal rotating platform 2, and the horizontal rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More