

Wall climbing robot
A wall-climbing robot and drive unit technology, applied in the field of wall-climbing robots, can solve problems such as inflexibility, lower stability, lower work quality and work efficiency, and achieve a wide cleaning range, high magnetic adsorption efficiency, and strong load capacity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
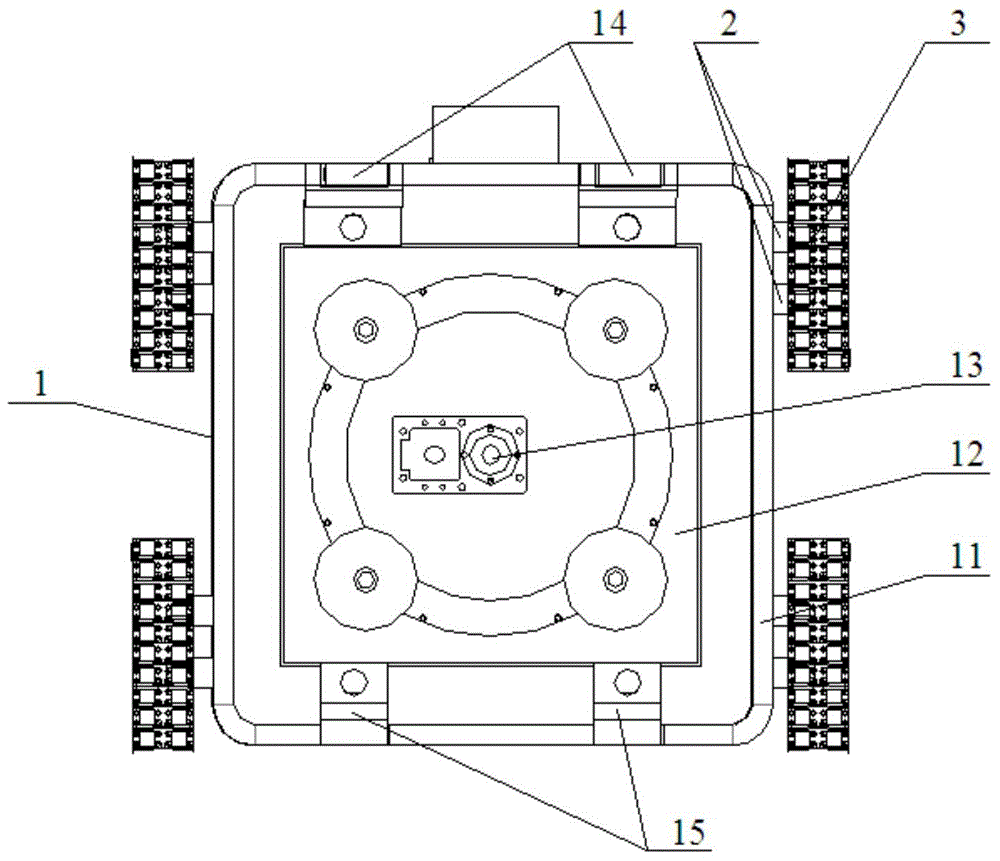
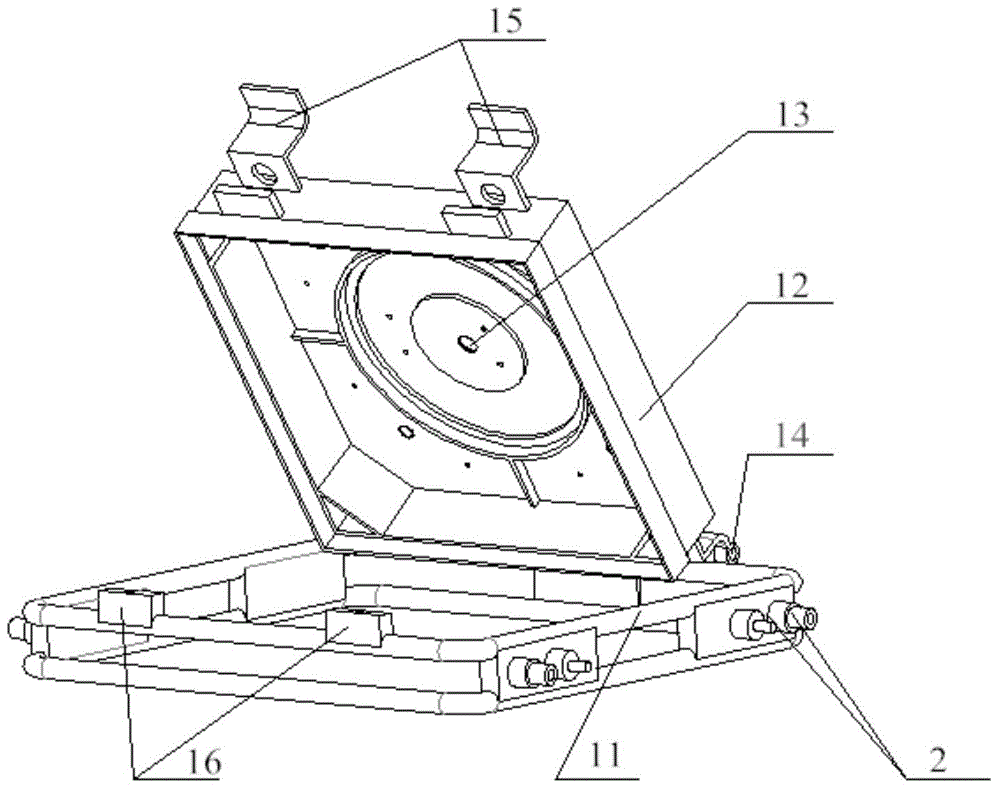
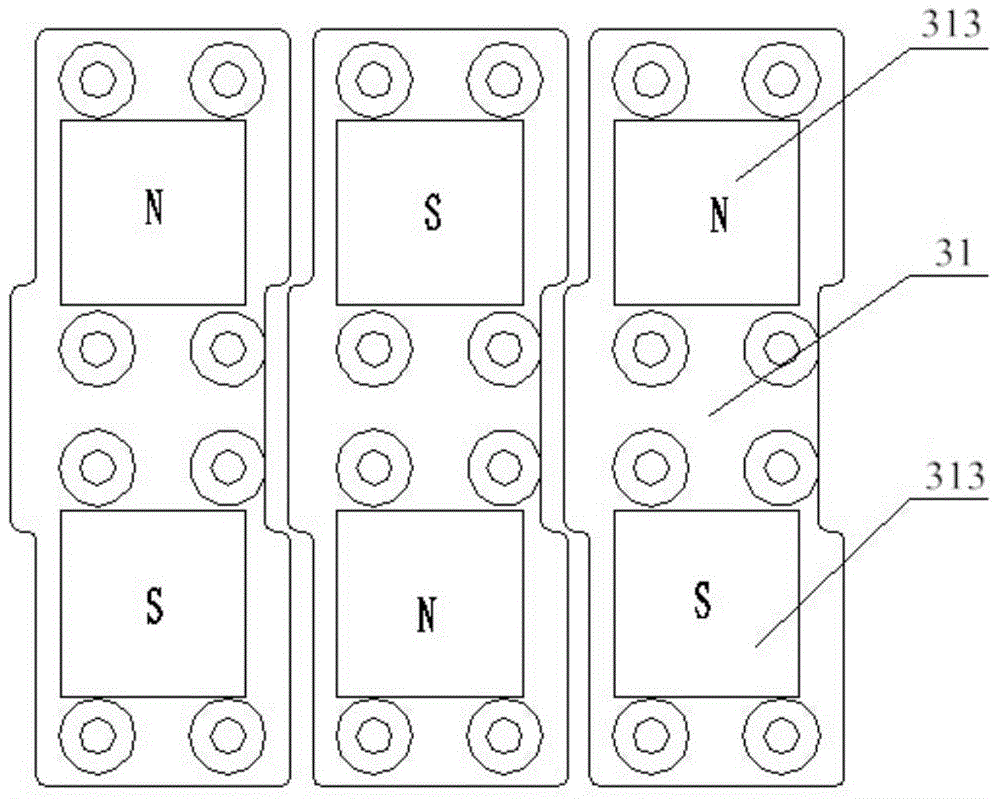
[0028] like Figure 1 to Figure 4 As shown, a wall-climbing robot of the present invention includes a car body 1, four drive units 2 and four crawler belts 3, two drive units 2 are respectively installed on the left and right sides of the car body 1, and the four drive units 2 Connect with four crawler belts 3 respectively; each said crawler belt 3 all comprises a plurality of crawler shoes 31 connected into a ring, and each said crawler shoe 31 includes a magnetic conduction mounting plate 311, a magnetic isolation plate 312 and a permanent magnet 313, so The magnetic isolating plate 312 is arranged on the magnetically conductive mounting plate 311, and two permanent magnets 313 with opposite magnetic properties are embedded in the laterally symmetrical position of the magnetic isolating plate 312, and the two permanent magnets 313 are separated by the magnetic isolating plate 312. The magnetic properties of the two adjacent permanent magnets 313 on two adjacent track shoes 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More