

Unmanned aerial vehicle visible light and infrared image target positioning method under large squint angle
A technology of target positioning and infrared images, which is applied in the field of remote sensing image processing to achieve the effect of small calculation and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
[0027] The present invention is a target positioning method of UAV visible light and infrared images under a large oblique viewing angle, the process is as follows Figure 8 As shown, the specific implementation steps are as follows:
[0028] The first step: Target positioning of visible light and infrared images based on imaging model;
[0029] Specifically:
[0030] (1) Geometry correction of reconnaissance image system based on coordinate system conversion;
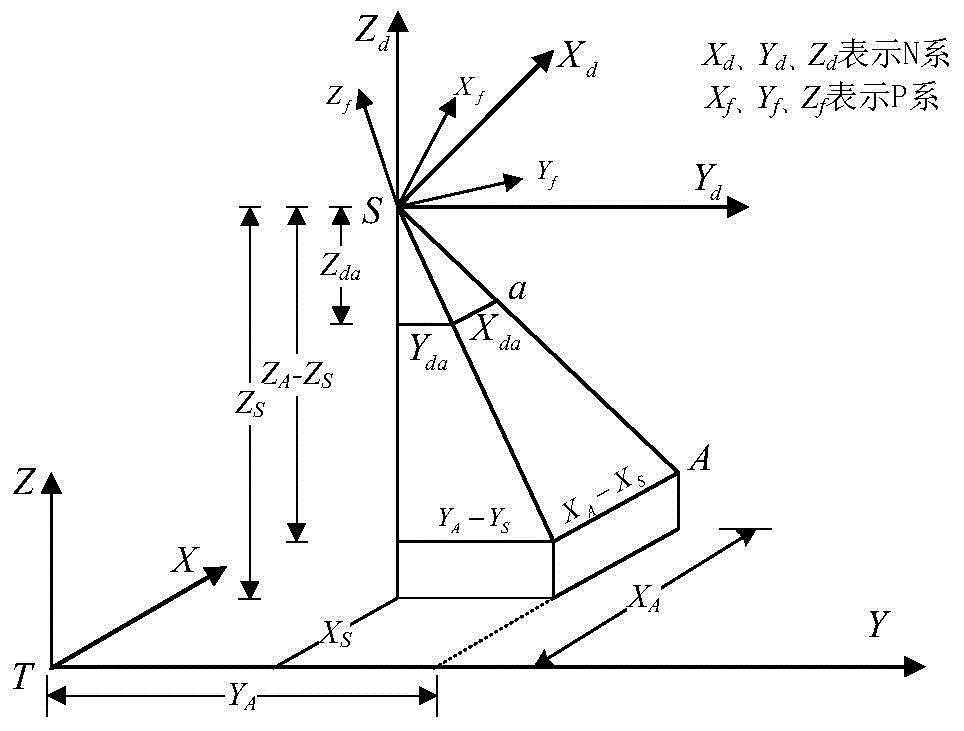
[0031] The process of image correction is actually the process of converting the image coordinate system to the earth coordinate system.
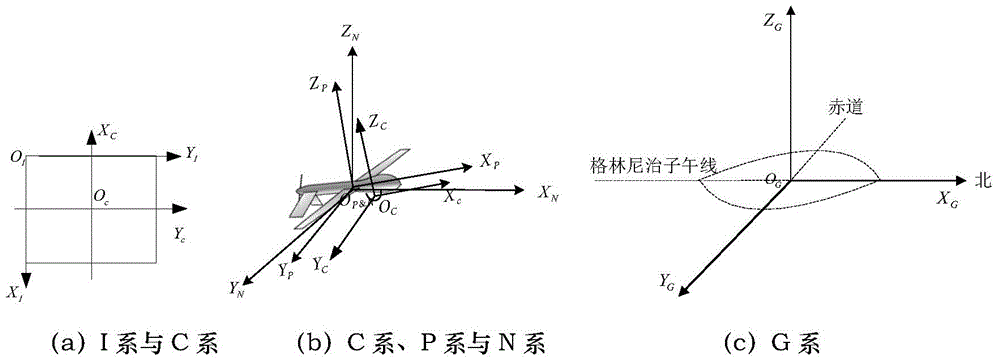
[0032] To perform system-level geometric correction based on the central projection imaging model, it is necessary to establish the transformation relationship between each coordinate system. The transformation from the image plane to the space Cartesia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More