

Wheel-footed convertible toy robot
A robot and variable technology, applied in the field of robots, can solve the problems of low moving speed, slow walking, single function, etc., and achieve the effect of improving adaptability and reducing coupling degree
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
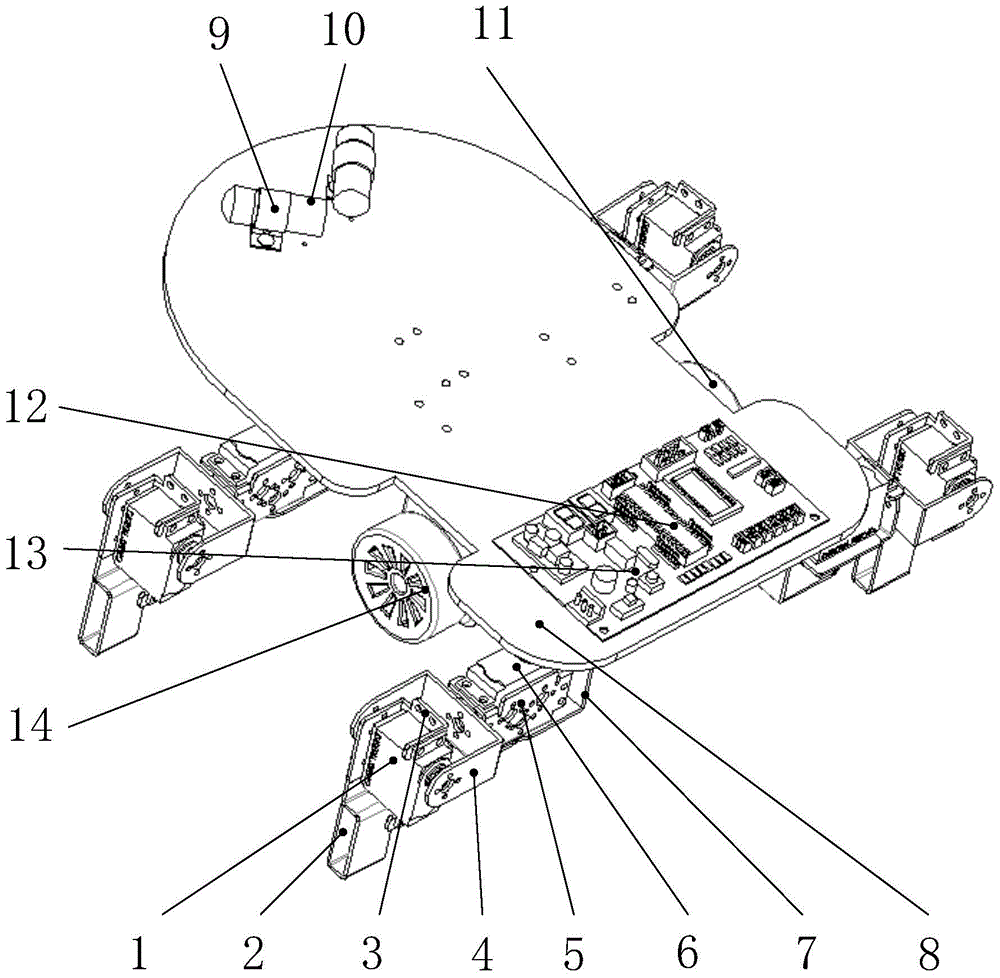
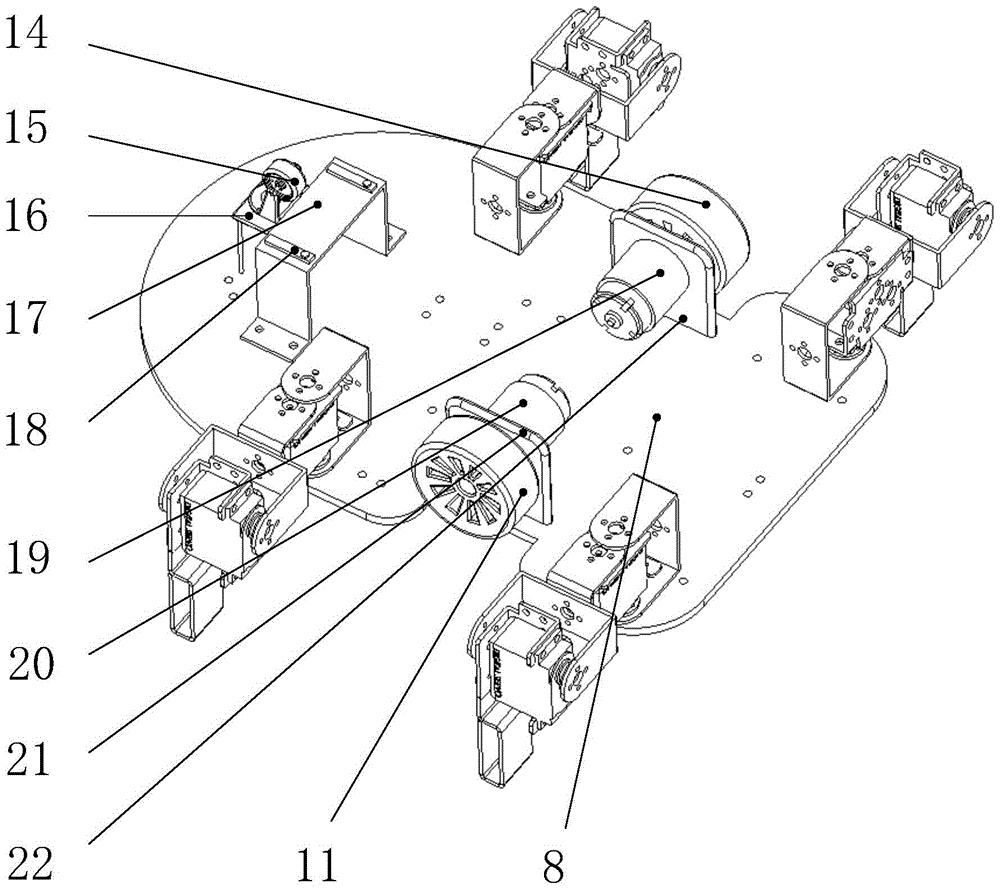
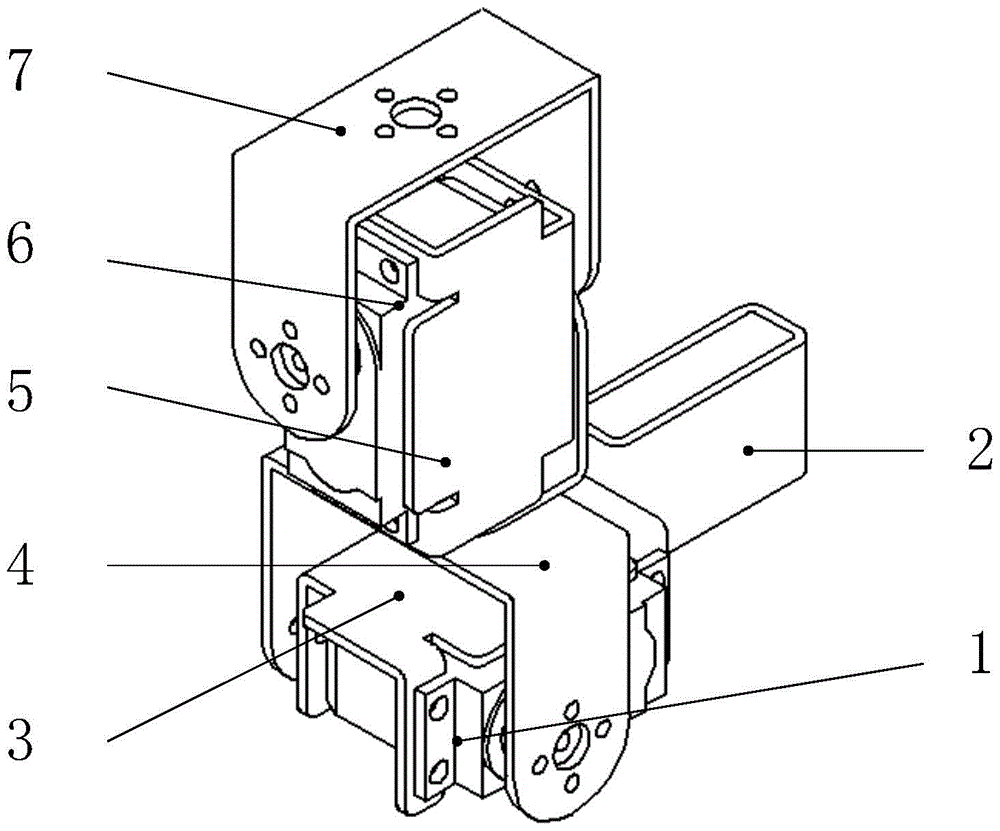
[0018] exist figure 1 In the schematic diagram of the wheel-foot variable cell toy robot shown, four mechanical legs with the same structure are respectively arranged at the front, rear, left, and right sides of the bottom of the frame 8, and are symmetrically arranged. The thigh steering gear 6 in each mechanical leg is connected to the thigh steering gear through bolts. The frame 5 is fixedly connected, and the thigh steering gear is fixedly connected with the thigh frame connecting U-shaped frame 7 at the same time, and the thigh frame is connected with the U-shaped frame through bolts. The lower leg 2 is fixedly connected with the lower leg steering frame 3 The lower leg steering gear 1 is fixedly connected to the lower leg steering rack through bolts, and the lower leg steering gear is also fixedly connected to the thigh connecting U-shaped frame 4, and the bottom of the thigh steering rack is fixedly connected to the thigh connecting U-shaped rack. (Such as image 3 sho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More