

Rotary-wing drone provided with a video camera supplying stabilised image sequences
A rotor unmanned and unmanned aerial vehicle technology, applied in the field of rotor unmanned aerial vehicles, can solve the problems of low-resolution CCD sensor, inability to apply, insufficient fluid video sequences, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Exemplary embodiments will now be described.
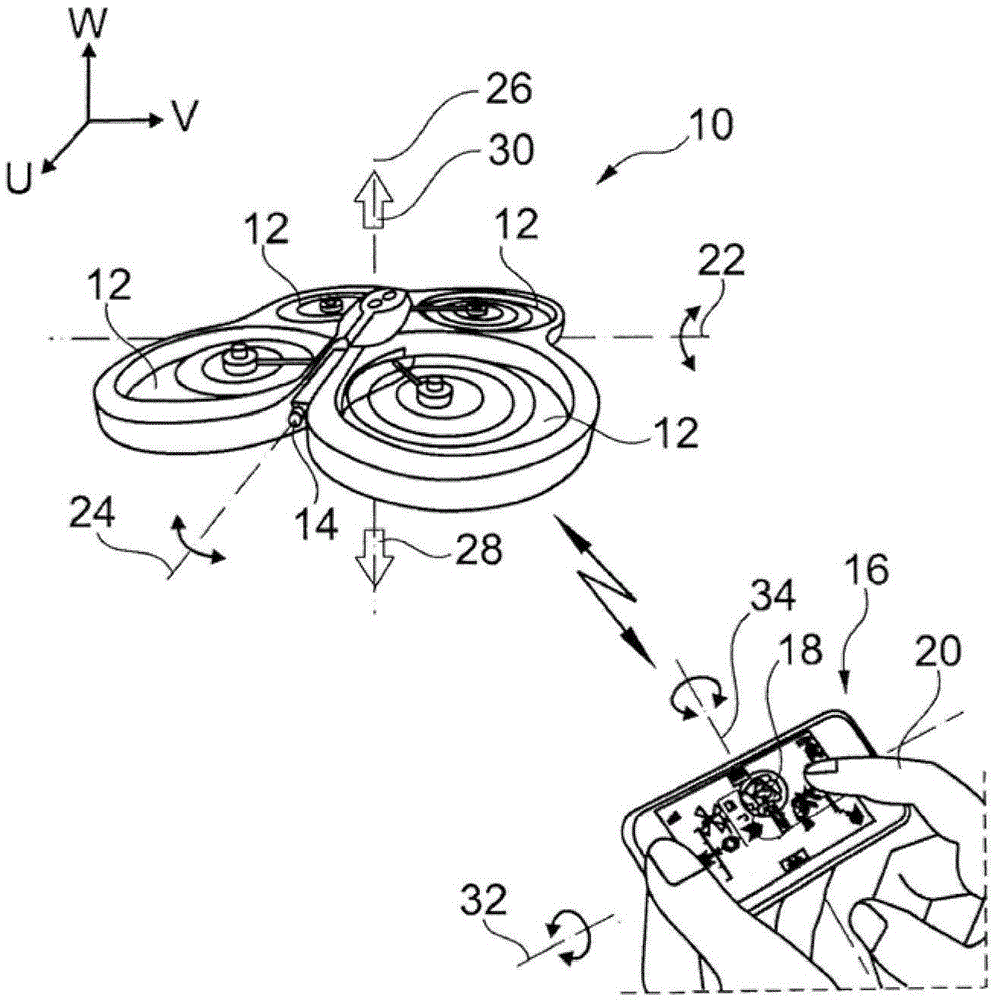
[0068] exist figure 1 , reference numeral 10 generally designates an unmanned aerial vehicle, such as a quadrotor helicopter, such as the AR. UAV 2.0 of Parrot SA, Paris, France, described in particular in the above-mentioned WO2010 / 061099A2 and EP2364757A1 .
[0069] The drone 10 includes four coplanar rotors 12 whose motors are independently steered by an integrated navigation and attitude control system. It is equipped with a first front view camera 14 to allow obtaining an image of the scene the drone is pointing at.
[0070] The drone also includes a second downward looking camera (not shown) adapted to capture successive images of the ground being flown and used in particular to estimate the speed of the drone relative to the ground. Inertial sensors (accelerometers and gyroscopes) allow to measure with a certain accuracy the angular velocity and the attitude angle of the drone, i.e. the Euler angles (pitch Roll ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More