

Forging loading robot
A robot and clamping mechanism technology, applied in the field of robots, can solve problems such as turning the head, easy to fall off, slow rotation, etc., to prevent machine damage, good safety performance, and ensure stable commutation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
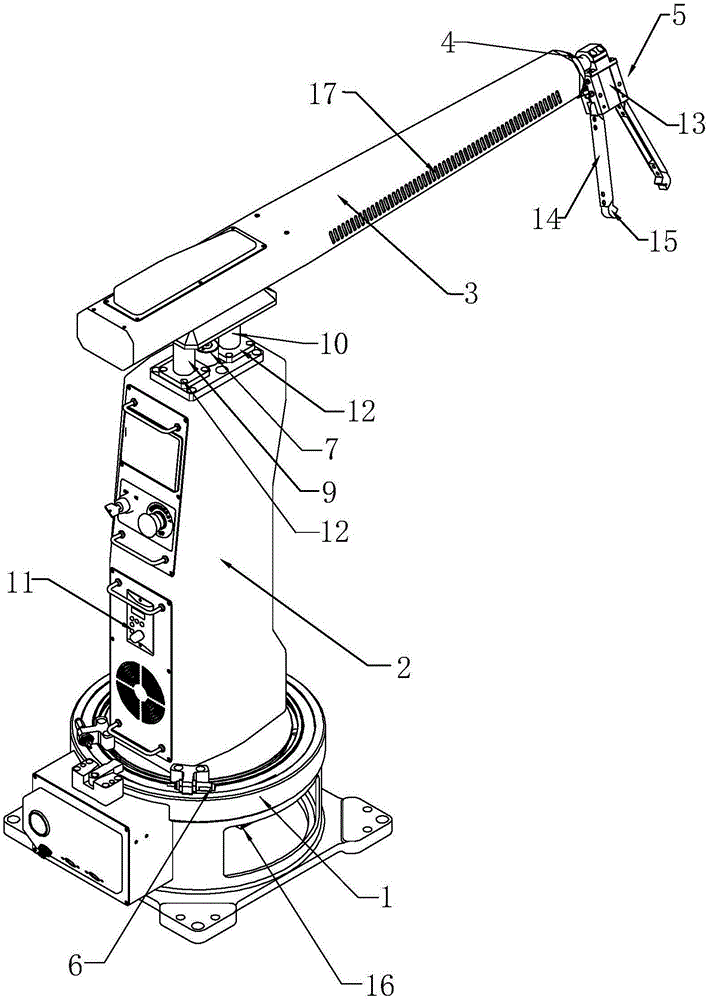
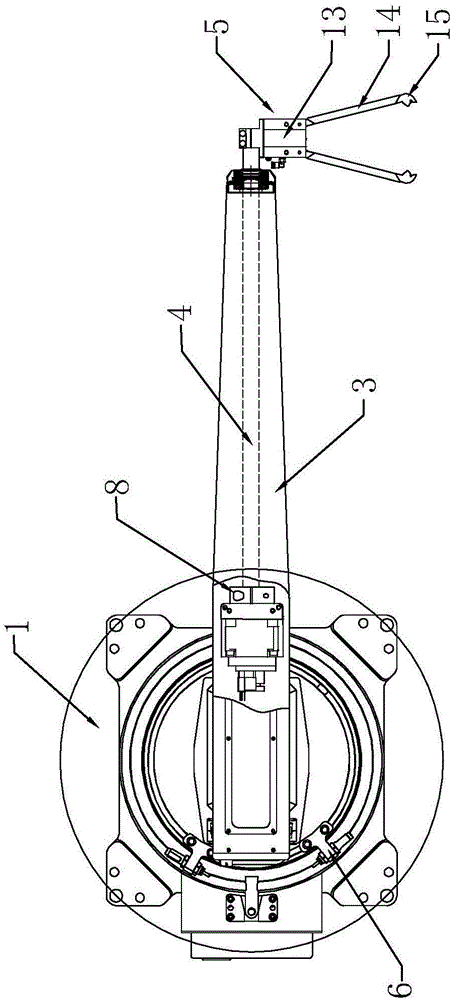
[0019] In this embodiment, the position when the rotating arm 2 is rotated to the intermediate position is defined as the 0° angular position of the rotating arm 2; the position when the lifting shaft 10 is at the lowest position is defined as the lower limit, that is, at 0 mm; The initial position of 4 is defined as the 0° angular position, that is, the position of the swing axis when the clamping mechanism 5 is vertically downward; the initial state of the double fork swing arm 14 is the open state, that is, the double fork swing arm 14 is vertical The face is at an angle of 30°.
[0020] Such as Figure 1 ~ Figure 2 The shown forging and feeding robot includes a rotating base 1, a rotating arm 2, a swing arm 3, a swing shaft 4, and a clamping mechanism 5. The rotating arm 2 is vertically installed on the rotating base 1 and can be moved with the rotating base 1 It rotates in the horizontal plane in a circumferential direction. Two hydraulic dampers 6 are also provided on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More