

Miniaturized underwater manipulator position angle measuring method
A measurement method and technology of position and angle, which are applied to measurement devices, instruments, etc., can solve the problem of high cost of high-precision ultrasonic probes and CCD cameras, and achieve the effects of low cost, simplified calculation process, and simple measurement process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The patent of the present invention will be described in further detail below in conjunction with the accompanying drawings.
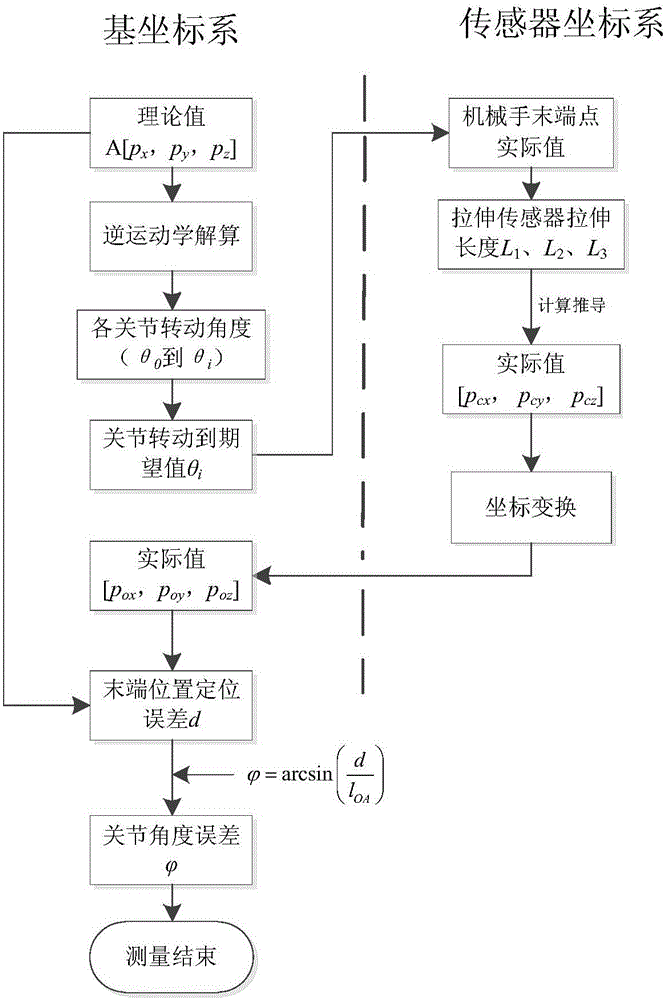
[0034] like figure 1 As shown, the measurement flow and implementation steps of the measurement method of the present invention are:
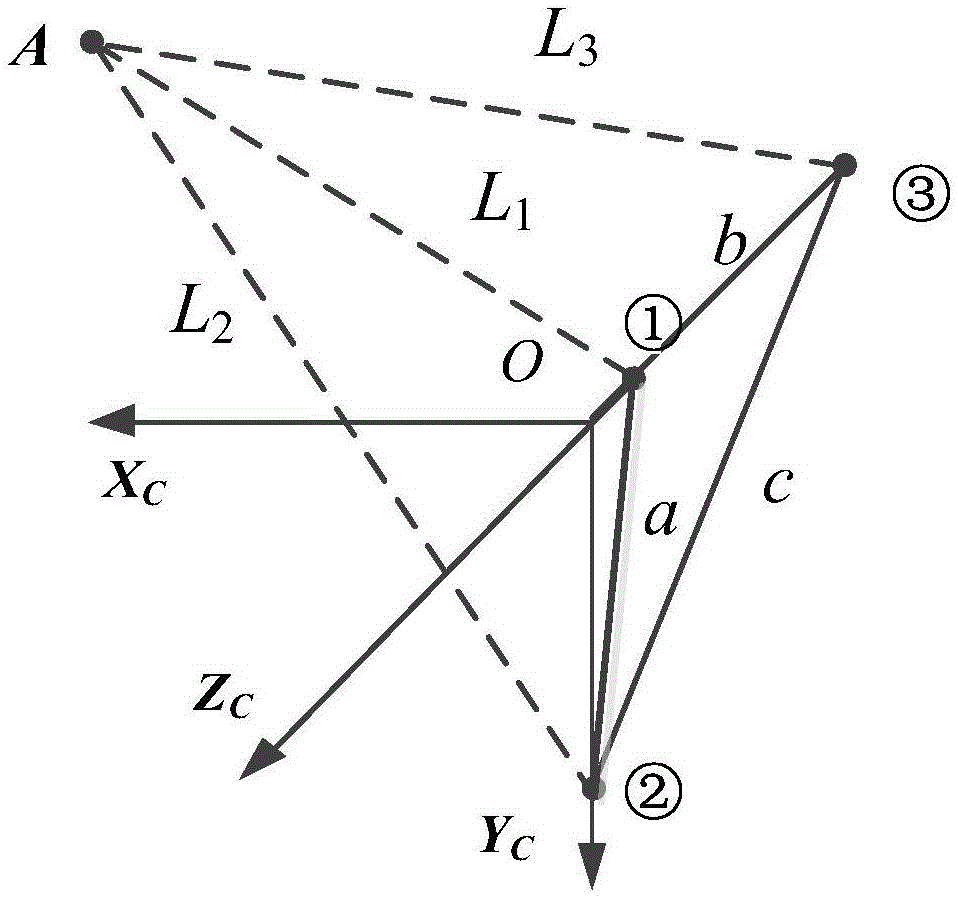
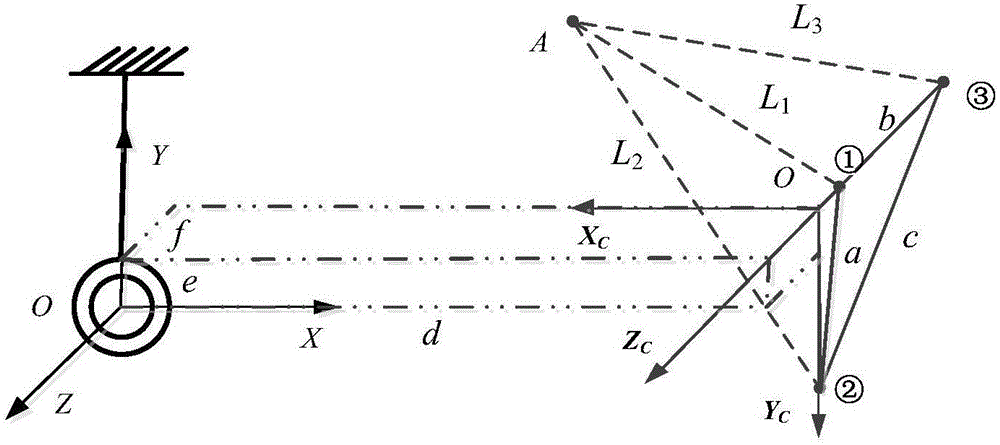
[0035] 1) First, based on the measurement principle of the present invention, establish the base coordinate system and the measurement coordinate system used when the method is measured; use the manipulator installation fixed point as the origin to establish the manipulator base coordinate system (O-XYZ), and connect the three pull rope displacement sensors. Install a three-dimensional position measurement device, and based on the device, a measurement coordinate system O-X can be established C Y C Z C . The base coordinate system (O-XYZ) takes the direction of the connection between the end point and the installation fixed point when the manipulator is fully unfolded as the X axis, the longitudinal direction...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More