High precision map path planning system and method
A route planning, high-precision technology, applied in the field of vehicle navigation, can solve the problems of inaccurate route guidance, local route planning cannot confirm which lane it is in, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
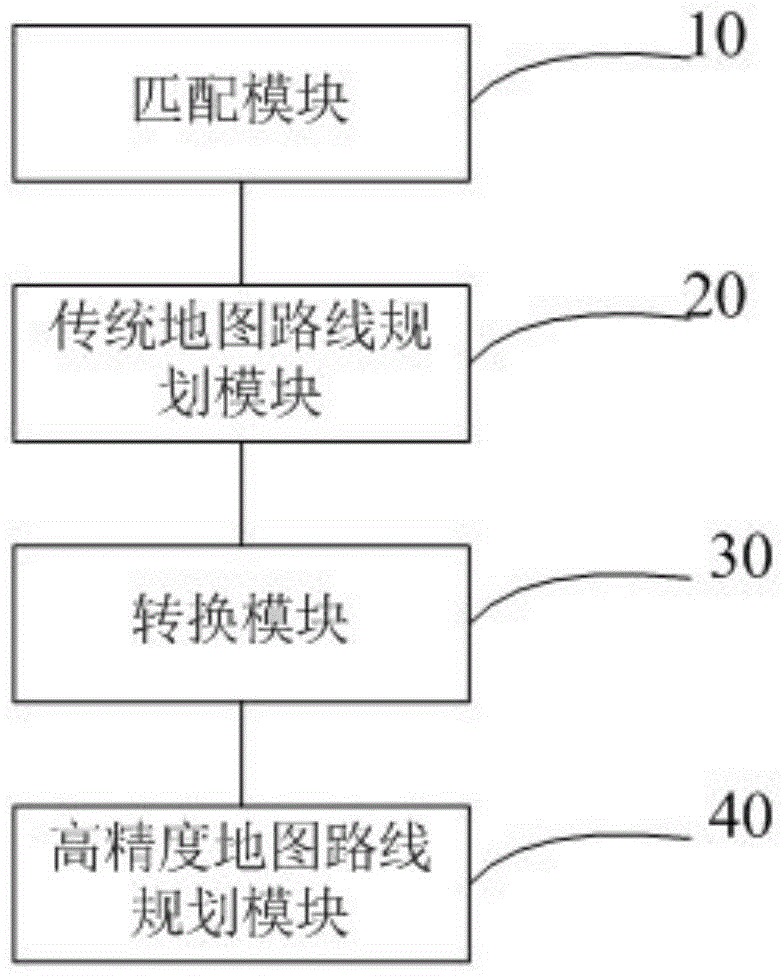
[0021] like figure 1 As shown, a high-precision map route planning system includes the following modules:
[0022] The matching module 10 is used to obtain the starting point and the ending point of the planned route; and match the starting point and the ending point to the traditional map and the high-precision map.
[0023] The traditional map refers to the existing road-level navigation map. The traditional map is data in a binary format (such as Kiwi format), and the data used for route planning refers to the Region data in the Kiwi format. The result of the traditional route planning is obtained through the A* algorithm combined with the Region data in the Kiwi format. Since it is not the focus of the embodiment of the present invention, the traditional route planning method will not be introduced in detail. High-precision maps refer to lane-level navigation maps.
[0024] The traditional map route planning module 20 is used to plan the shortest route road list between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com