

A Global Sliding Mode Fuzzy Control Method for Micro Gyroscope Inversion Based on Neural Network
A technology of micro gyroscope and neural network, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as inconvenience, system instability, and low robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0115] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
[0116] The inversion global sliding mode fuzzy control method based on the neural network of the micro gyroscope comprises the following steps:
[0117] 1. Establish the dimensionless dynamic equation of the micro gyroscope according to Newton's law in the rotating system
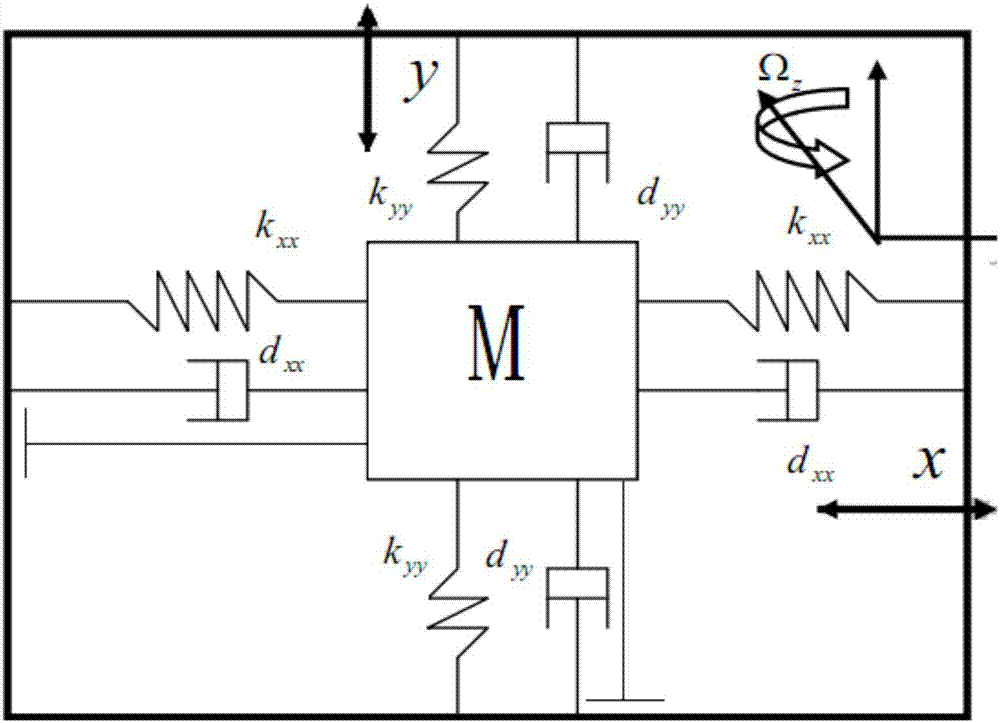
[0118] A micro-vibration gyroscope generally consists of three components: a mass supported by an elastic material, an electrostatic drive device, and a sensing device. The main function of the electrostatic driving circuit is to drive and maintain the constant amplitude of the vibration of the micro-vibration gyroscope, and the sensing circuit is used to sense the position and speed of the mass. The micro gyroscope can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More