

Dynamic PID global sliding mode control method of micro gyroscope neural network
A micro-gyroscope and neural network technology is applied in the field of dynamic PID global sliding mode control of the micro-gyroscope neural network, which can solve the problems of uncertainty of the micro-gyroscope system model and the like.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] Below in conjunction with the accompanying drawings and specific embodiments, the present invention is further described:
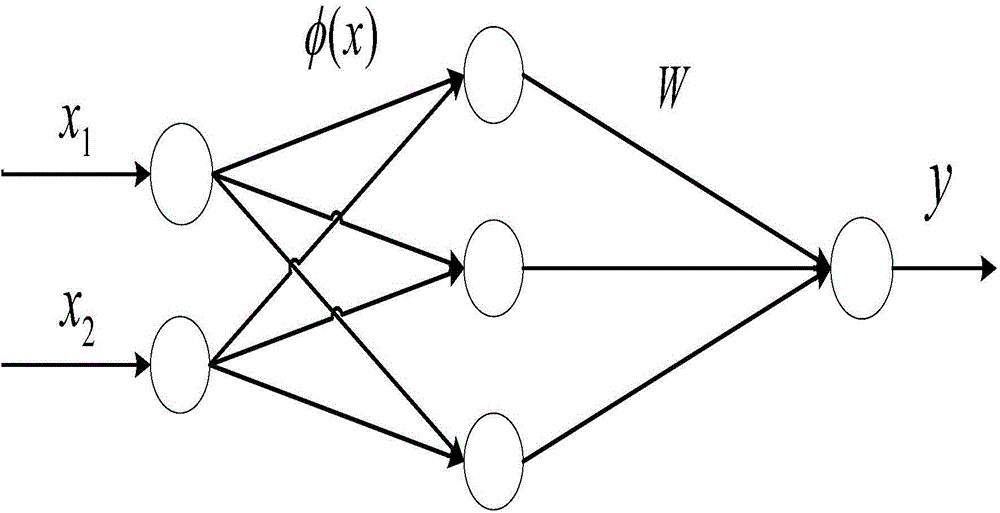
[0069] Micro-gyroscope neural network dynamic PID global sliding mode control method, such as image 3 shown, including the following steps:
[0070] 1. Establish the dimensionless dynamic equation of the micro-gyroscope according to Newton's law in the rotating system
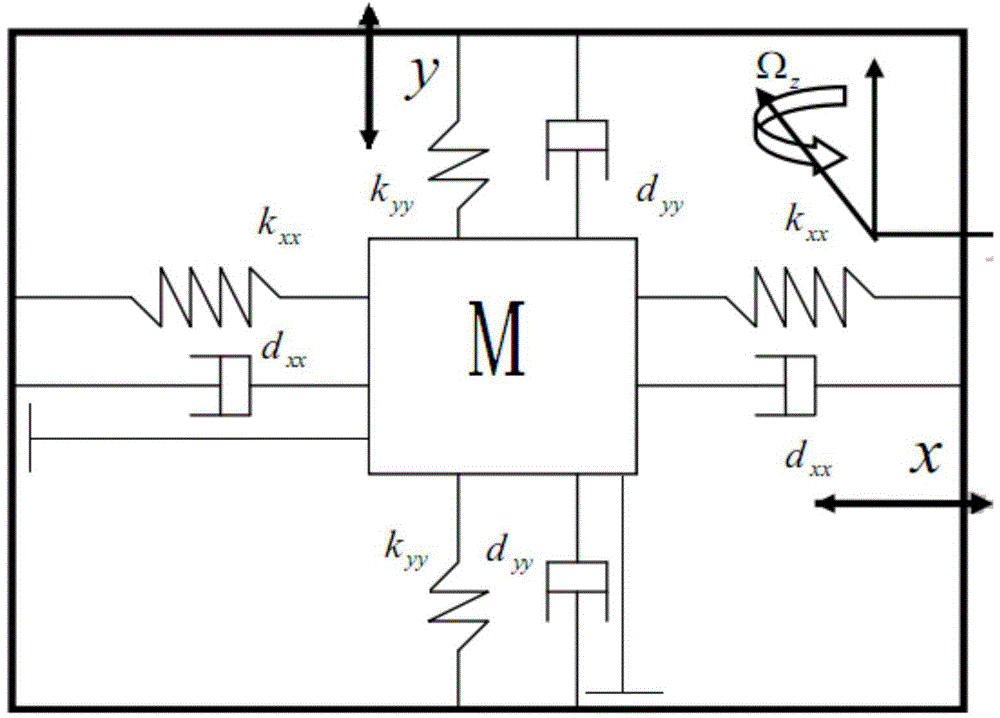
[0071] A microvibration gyroscope generally consists of three components: a mass supported by an elastic material, an electrostatic driving device and a sensing device. The main function of the electrostatic drive circuit is to drive and maintain the constant amplitude of the vibration of the micro-vibration gyroscope, and the sensing circuit is used to sense the position and speed of the mass. A micro-gyroscope can be simplified as a damped vibration system consisting of a mass and a spring. figure 1 A simplified microvibration gyroscope model in Cartesian coordinates is shown....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More