A control method of mobile robot control system based on wireless sensor network
A wireless sensor network and mobile robot technology, applied in the field of wireless sensing, can solve problems such as cost, accuracy, and lack of convenience in use, and achieve the effects of broad market application prospects, reduced system energy consumption, and good scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0030] Such as figure 1 As shown, a control method of a mobile robot control system based on a wireless sensor network includes a software part and a hardware part; wherein the software part includes a mobile robot positioning algorithm and an information collection algorithm, and the positioning algorithm is implemented by a beacon node, The information collection algorithm is realized by judging the distance threshold; the hardware part includes a mobile robot, a system base station and a beacon node.
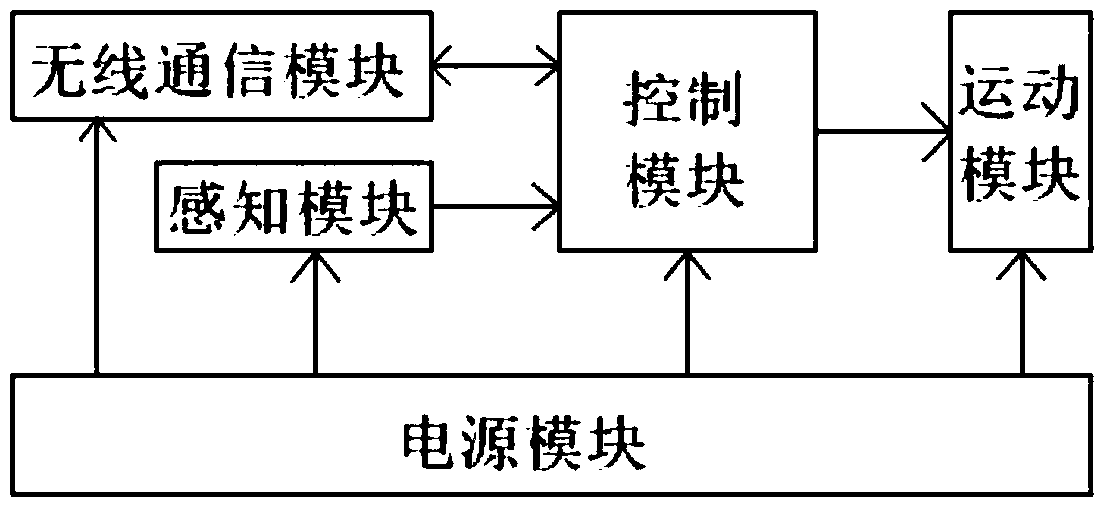
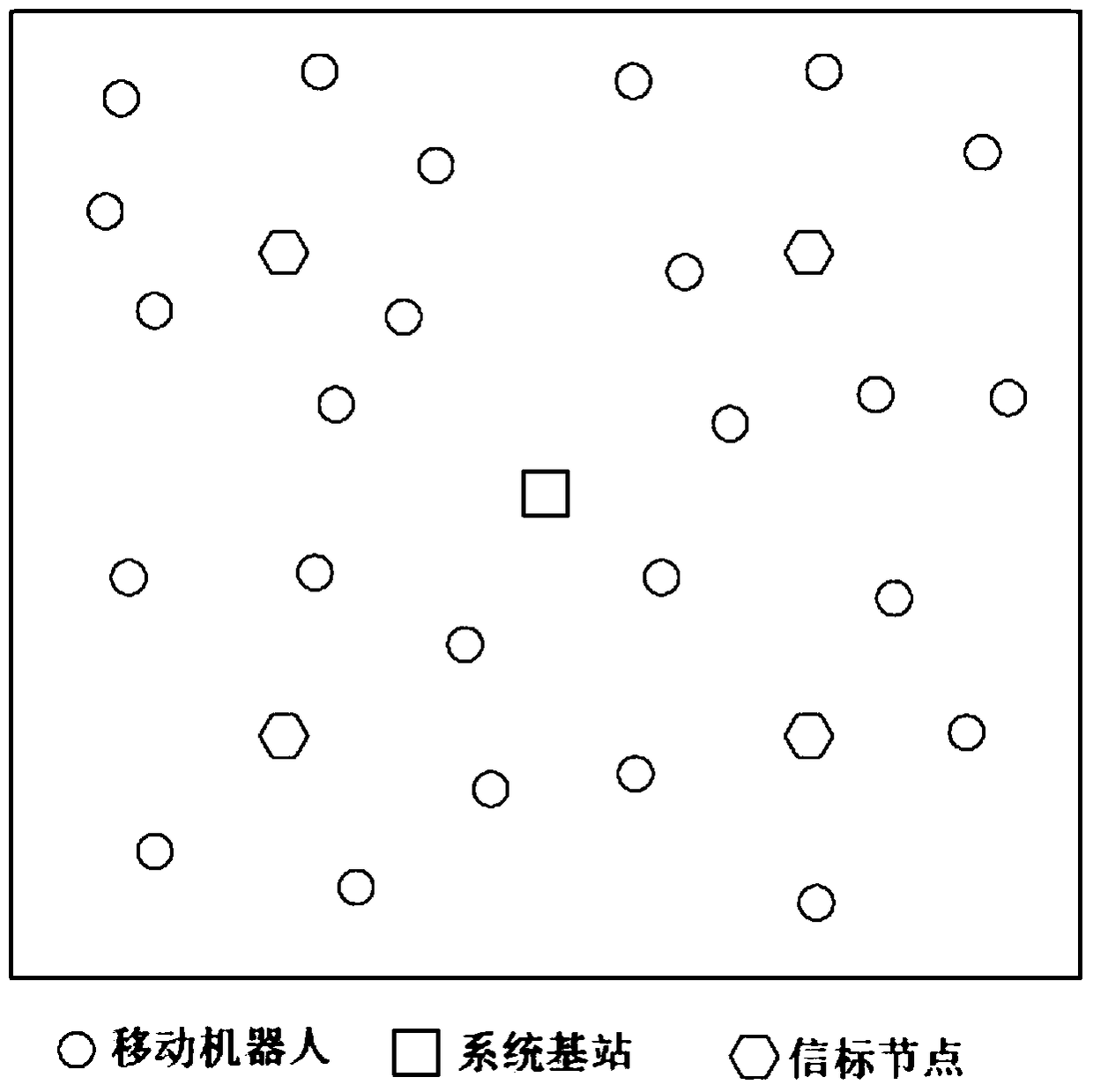
[0031] Such as figure 2 As shown, a mobile robot control system based on a wireless sensor network includes a system base station, a beacon node, and a mobile robot. The mobile robot includes a power module, a control module, a wireless communication module, a perception module, and a motion module, wherein the power module , used to supply ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com