

Bionic quadruped wall-climbing robot based on claw attachment
A wall-climbing robot and hook-claw technology, applied in the field of climbing robots, can solve the problems of complex structure and control, inability to change posture, single climbing surface, etc., and achieve simple structure, reduced body weight, and good crawling stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Describe in detail with the attached drawings
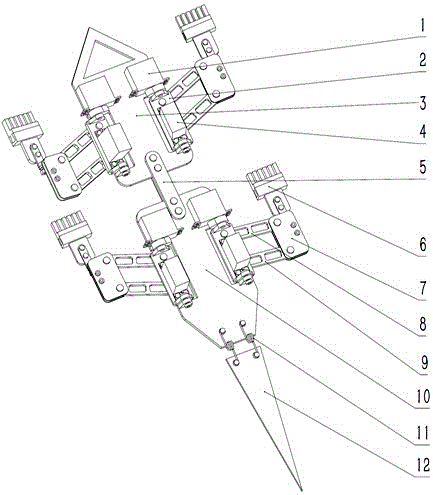
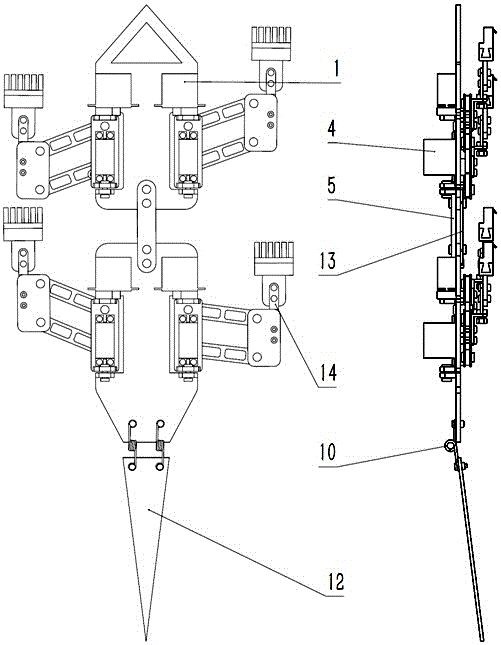
[0021] like figure 1 Shown is the specific design drawing of the bionic quadruped wall-climbing robot based on the claw. The robot consists of a front body plate 3, a lower body 10, legs, a tail 12, and soles 6. The leg is composed of a driving leg 9, a follower leg 8, a foot link 7, a pitch joint 2, a pitch steering gear 1 and a leg swing steering gear 4. The pitching servo 1 is placed on the front body plate 3 by gluing, the leg swing servo 4 is installed on the pitch joint 2 through the reserved servo hole, and the leg swing servo 4 and the pitch joint 2 are fixed by screws and nuts. One end of the pitch joint 2 is installed on the output shaft of the pitch steering gear 1, and the other end is hinged with the front body plate 3. One end of the follower leg 8 is hinged on the pitch joint 2, the other end is hinged on the sole link 7, one end of the driving leg 9 is fixed on the output shaft of the swing leg steering g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More