

High load-to-weight ratio hexapod bionic robot and its leg structure optimization method
A technology of bionic robot and optimization method, which is applied in the field of structural design and leg design of hexapod bionic robot, can solve problems such as poor load-to-weight ratio and achieve effective response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Specific embodiments of the present invention are described with reference to the above drawings.
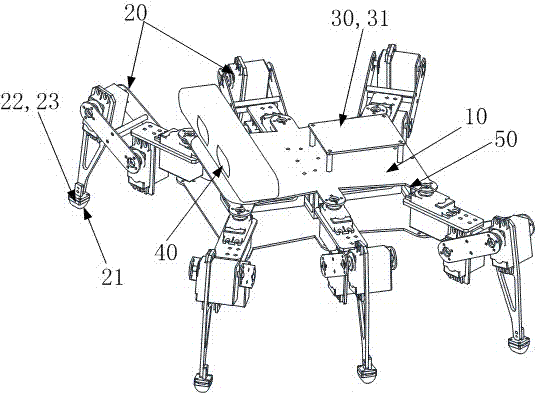
[0025] Depend on figure 1 , figure 2 , Figure 6 to Figure 8 It can be seen from the figure that firstly this high load-to-weight ratio hexapod bionic robot of the present invention includes a main body 10, and six legs 20 are equally divided into two groups and arranged along opposite sides of the main body 10, and each leg in the six legs 20 is arranged according to The following leg structure optimization method selects the length, and further includes a controller 30 for controlling the work of each part of the robot.
[0026] Depend on figure 1 and figure 2 As can be seen in the figure, the robot also includes a depth camera 40 arranged at the front end of the main body 10, and further includes a pressure sensor 22 and a touch switch 23 arranged on the foot end 21 of each leg, and furthermore, a rear end of the main body 10 is designed. Infrared sensor 50. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More