

Multi-control surface unmanned aerial vehicle direct lift force control method
A technology of surface unmanned aerial vehicles and control methods, applied in attitude control, three-dimensional position/course control, etc., can solve problems such as the inability to achieve decoupling of attitude and trajectory, direct lift control, unpredictable force command distribution, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] Basic thought of the present invention is:
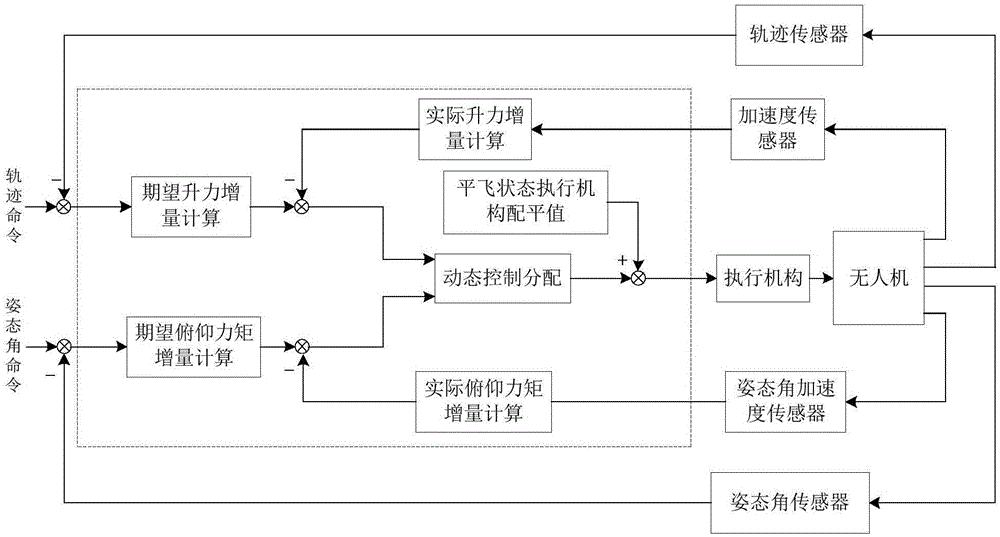
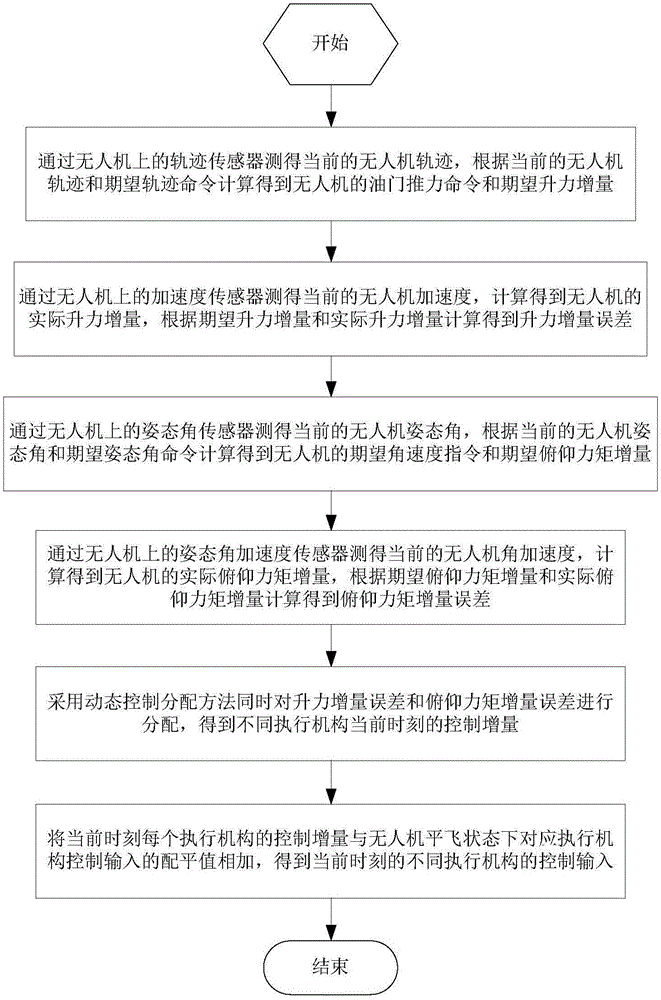
[0079] Firstly, the lift incremental error is obtained according to the expected trajectory command and the UAV’s current trajectory and acceleration information, and at the same time, the pitching moment incremental error is obtained according to the expected attitude angle command and the UAV’s current attitude angle and attitude angle acceleration information, and then through dynamic The control distribution method distributes the lift incremental error and the pitching moment incremental error at the same time, so as to obtain the deflection angle of each control surface, and then realize the direct lift control of multi-control surface UAV.
[0080] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0081] combine figure 1 and figure 2 As shown, the direct lift control method of multi-control surface UAV includes the following steps:
[0082...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More