

Gradual extraction method of building top surface from airborne lidar point cloud based on classification and layering
A progressive extraction and building technology, which is applied in the extraction of the top surface of buildings based on Lidar point clouds and the reconstruction of 3D models of buildings. Problems such as segmentation errors, difficulty in obtaining good results on the top of buildings, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
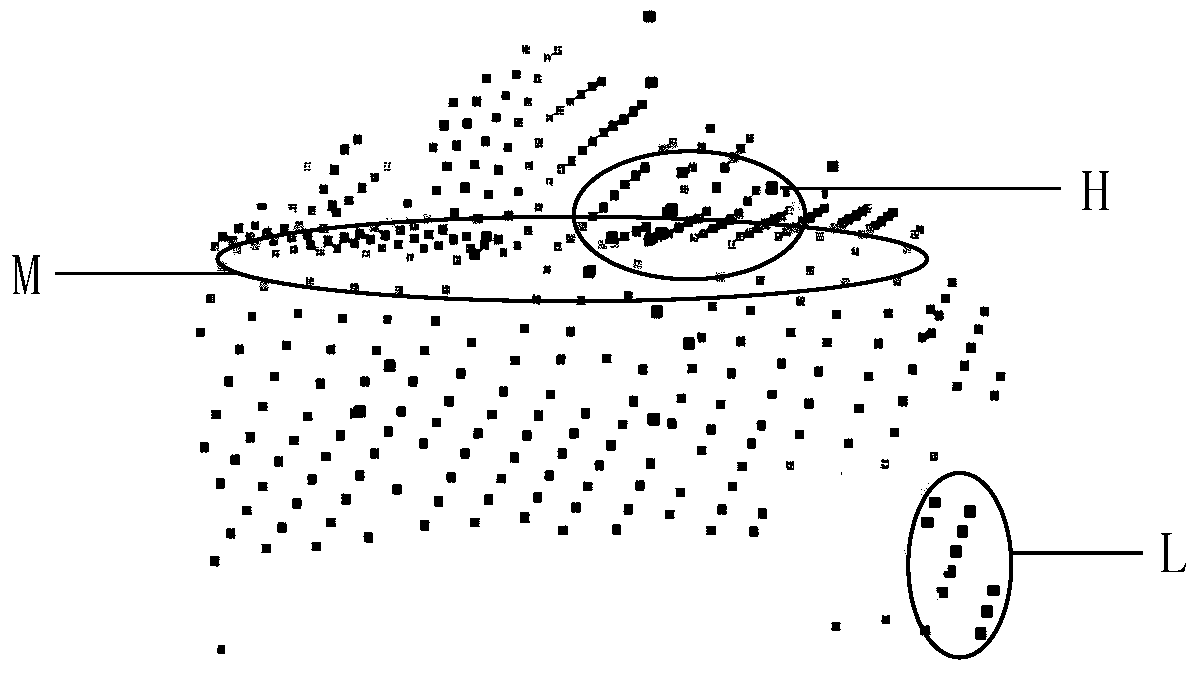
[0060] This embodiment selects the Lidar point cloud data of real building, and this building comprises A, B, C, D, E, F, G, H, I, J, L, Q etc. 12 different in size The top surfaces, and the included angles between the top surfaces are also of different sizes. For example, the four top surfaces of Q, L, I, and J have very small areas (the number of sampling points on them is only 5, 6, 6, and 5), and the angle between the two top surfaces of D and C very small. At the same time, there is an erected slender chimney and two horizontally passing wires above the building, which will cause noise points in the Lidar point cloud data of the building.
[0061] The original Lidar point cloud data of buildings is as follows: figure 2 As shown, it gives the original point cloud data of the building collected by the airborne Lidar system, where the deep black point in the L area is the point on the lowest top surface of the building; the deep black point in the H area is The points on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More