Virtual pipeline dynamic obstacle avoidance control method for remote operation man-machine interaction
A technology of human-computer interaction and virtual pipeline, which is applied in the field of virtual pipeline dynamic obstacle avoidance control, can solve the problems of difficulty in guaranteeing operation safety and difficulty in using offline task planning at the same time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0088] A specific implementation example of the present invention is to design dynamic obstacles in a virtual scene, and realize dynamic obstacle avoidance at the end of the mechanical arm through visual sensors and artificial potential fields. The specific process is as follows:
[0089] 1. Construct the experimental scene:
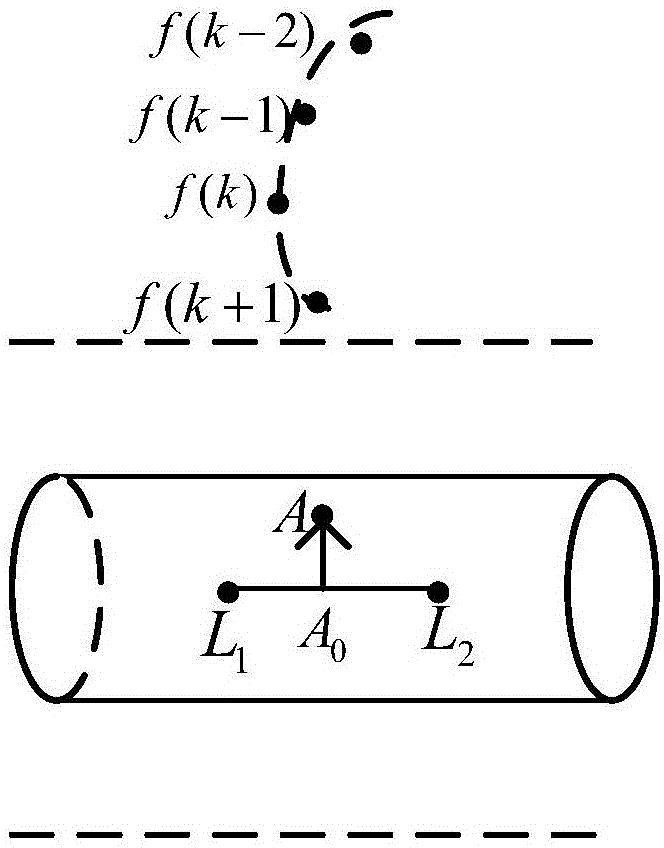
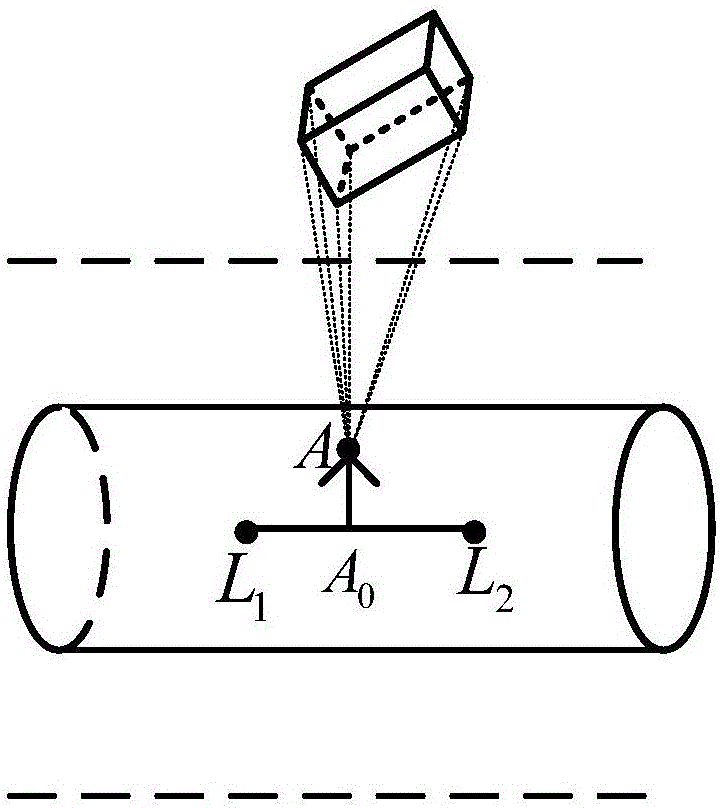
[0090] In the experiment, the master end is a PHANTOM hand controller with 6 degrees of freedom, and the slave end is a virtual pipeline planned in the CHAI3D virtual three-dimensional space. The agent point is used to replace the end point of the mechanical arm, and the dynamic obstacle O is designed, and the position change of O is used The function f(t) expresses.
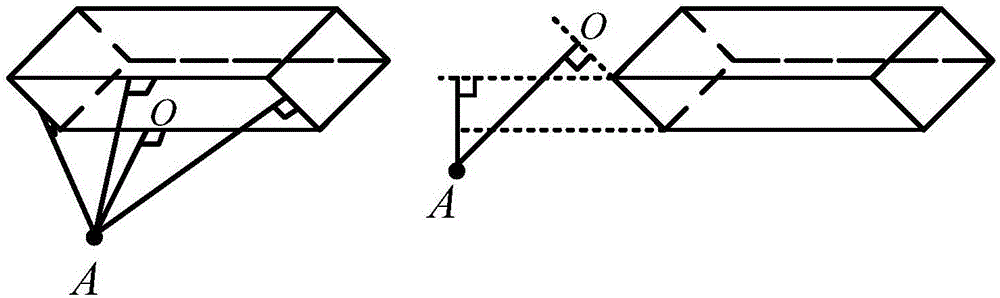
[0091] 2. The establishment of the potential field at the agent point:
[0092] By the definition of the potential field function, let η be a limiting parameter, take η=0.5 in the experiment; ρ 0 Indicates the action distance of the potential field at the end of the manipulator, ρ 0 Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More