

Spider-imitating multi-foot robot platform
A multi-legged robot and a spider-like technology, applied in the field of robots, achieves the effects of good shock absorption, low cost, and a simple and practical body
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
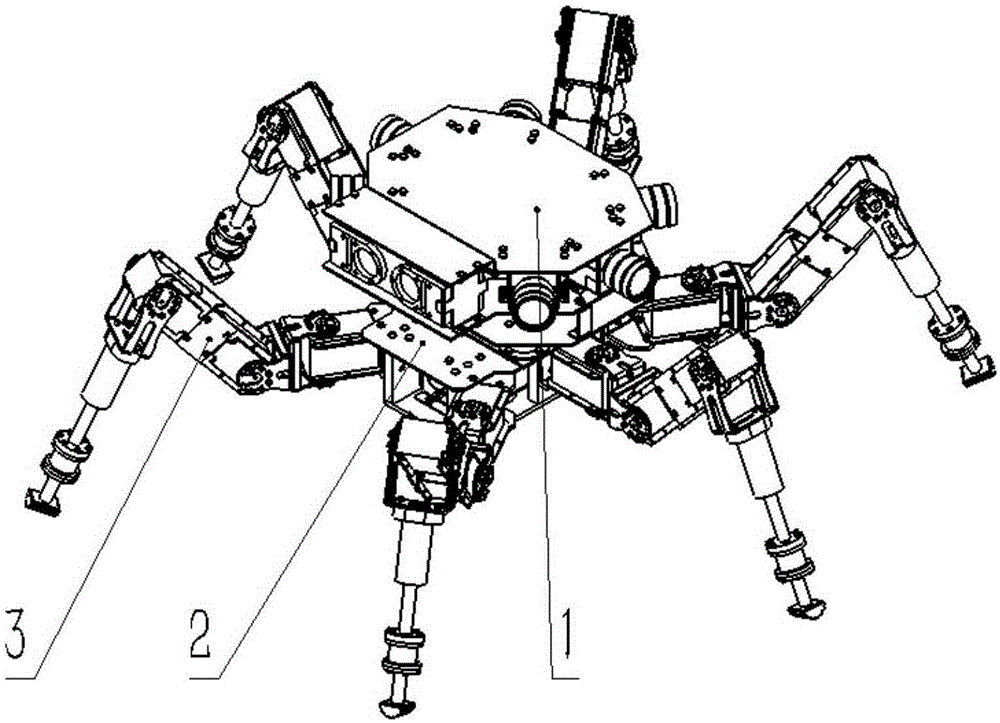
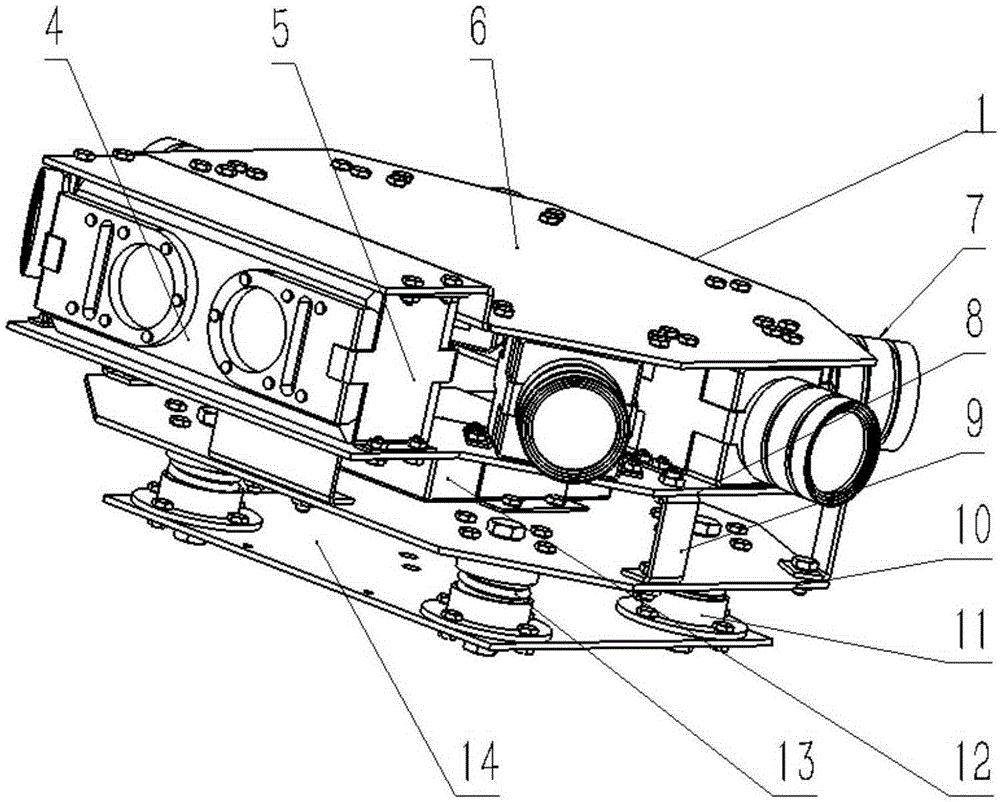
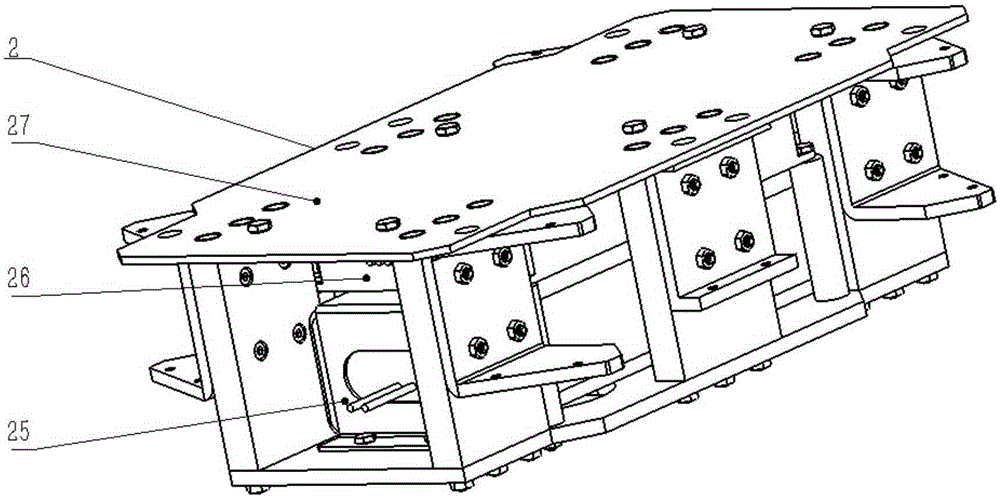
[0026] Comply with the above technical solutions, such as Figure 1 to Figure 4 As shown, a spider-like multi-legged robot platform includes a fuselage 2, and a plurality of mechanical legs 3 driven by steering gears are distributed on the outside of the fuselage 2. A vision system 1 is arranged above the fuselage 2, and the vision system 1 includes Stereo camera 4 and monocular camera 7, stereo camera 4 and monocular camera 7 are arranged on a casing, and casing is installed on the fuselage 2 through driving mechanism.
[0027] The robot platform provided by this solution adopts a bionic design structure, and six mechanical legs 3 are connected to the fuselage 2, which is similar to the structure of a spider. The mechanical leg 3 is controlled by multiple steering gears, which makes the mechanical leg 3 have multiple degrees of freedom and is more flexible. At the same time, a plurality of mechanical legs 3 are distributed on the outside of the fuselage 2, making the action p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More