

A method of controlling an unmanned aerial vehicle
A technology of unmanned aerial vehicle and control method, applied in the control field of unmanned aerial vehicle, can solve the problems of flying unmanned aerial vehicle, waste of manpower, etc., and achieve the effect of improving real-time performance and improving experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] This embodiment is described by taking the remote controller on a car as an example. At this time, the remote controller moves with the car. The unmanned aerial vehicle of this embodiment is described using a quadcopter as an example.
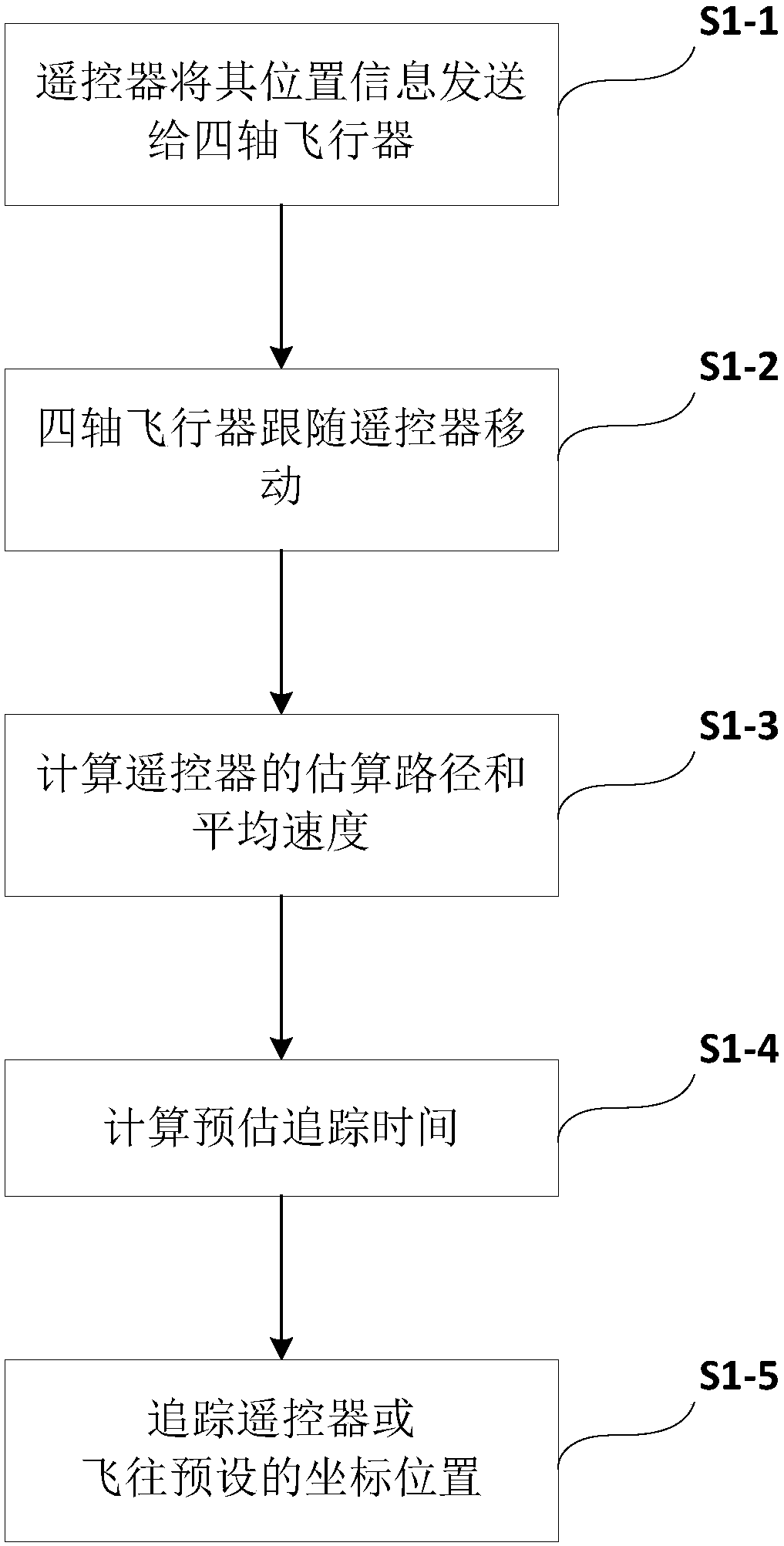
[0030] Such as figure 1 As shown, the control method of the quadcopter of the present embodiment includes steps:
[0031] A control method for a quadcopter, comprising the steps of:
[0032] S1-1: The remote controller sends its position information to the quadcopter.
[0033] S1-2: The quadcopter stores the location information and the receiving time of each piece of location information, and moves with the remote controller.
[0034] S1-3: When the signals between the quadcopter and the remote controller are interrupted, the quadcopter invokes all the position information stored in this mission and its receiving time, and calculates the estimated path and average speed of the remote controller.
[0035] S1-4: The drone calls the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More