

Flexible bionic mechanical hand device
A manipulator and flexible finger technology, applied in the field of bionic manipulator devices, can solve problems such as poor adaptability, and achieve the effects of easy control, stable grasping of objects, and good economy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention is described in detail below in conjunction with accompanying drawing:
[0033] A kind of flexible bionic mechanical hand device described in the present invention, such as Figure 1 to Figure 13 shown;
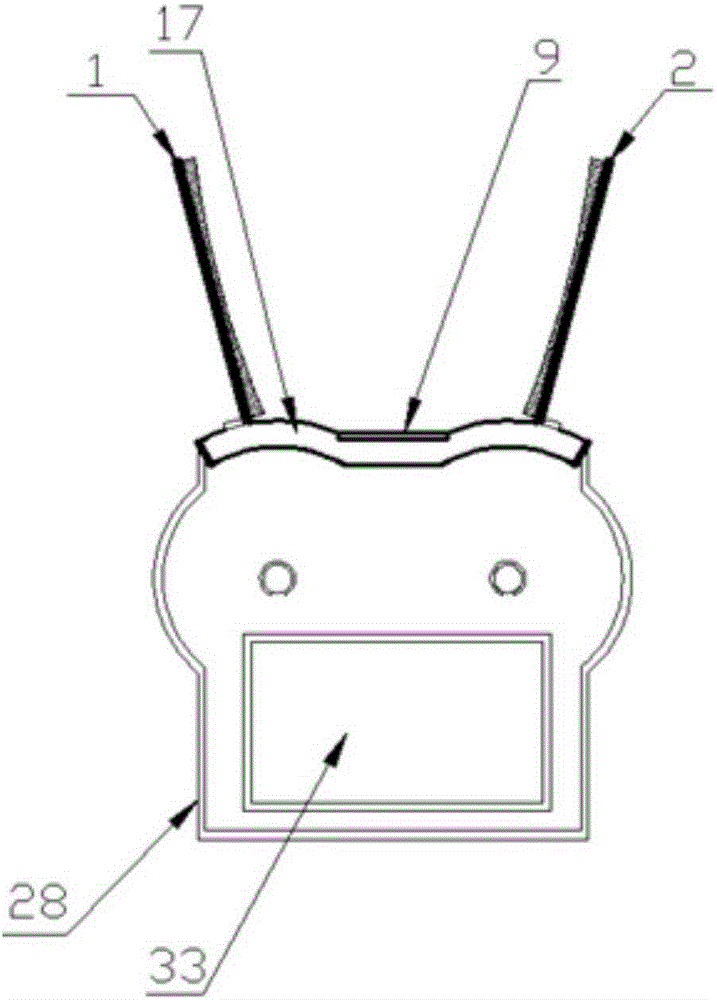
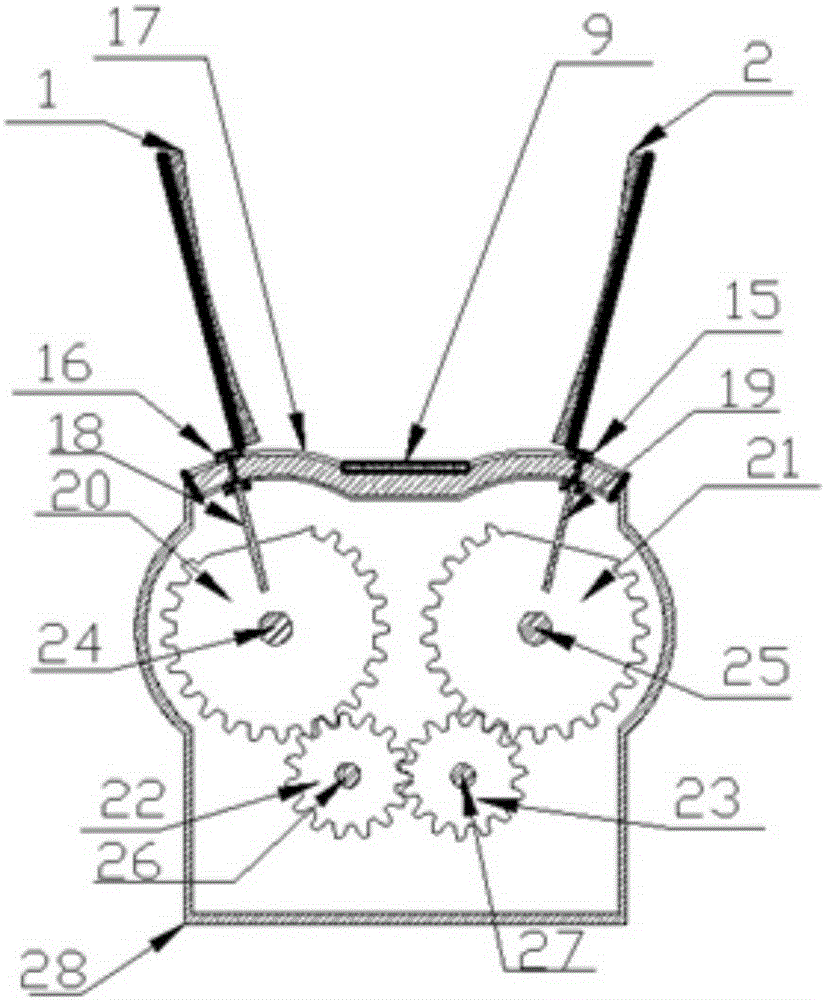
[0034] The device comprises a box-shaped housing 28 with a closed top opening at the bottom. A double-arched slideway 17 is installed at the top opening of the housing 28. The middle part of the double-arched slideway 17 is straight, both sides are arc-shaped and the middle part has a Through the chute in the horizontal direction, two flexible fingers extend into the housing 28 through the chute of the double-arched slideway 17;
[0035] The flexible finger is composed of a rubber finger surface 3 and a finger skeleton 4, wherein one flexible finger is a flexible wide finger 1, and the other flexible finger is a flexible sub-finger 2, wherein the flexible wide finger 1 is made of a wider one-piece rubber The finger surface and a wider one-piece ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More